Table of Contents
What is islanding detection?
Islanding occurs when part of a power network, disconnected from the main grid, is solely powered by some Distributed Energy Resources (DERs), and presents voltage and frequency conditions that are maintained around nominal values. In general, only unintentional islanding is studied, as intentional islanding wouldn’t otherwise require automated detection.
Islanding detection aims to identify the islanding condition and prevent the DERs from maintaining operation. As islanding is always considered an undesirable situation, islanding detection, islanding prevention, and anti-islanding refer to the same unique concept.
Historical background
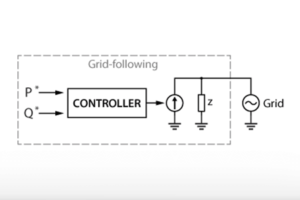
Islanding detection originally emerged in association with photovoltaic applications. Indeed, in the first industrial requirements (IEEE929-2000, IEEE1547-2003, UL1741 or IEC 62116), the focus was primarily set on PV inverters designed for household-size or residential applications, and operating exclusively as grid following inverters. This scope can be suspected to have been largely influenced by grid operators, then worried about the fast – and then considered possibly high – penetration of renewables in residential areas.
Most of the corresponding literature dates back to the early ’00s. In this context, islanding detection was extensively documented in the references stemming from the original contributions from Sandia, NREL, and other similar institutions [1-4]. There are also numerous secondary articles, more or less paraphrasing the same original contributions. At this point, the considered applications were mostly single-phase, single-inverter applications with no inertia (real or virtual), no grid support functions, purely linear passive load, etc. DQ current control and PLLs – especially single-phase (e.g. SOGI-PLL) – were relatively uncommon.
More recently, the observation that the risk of islanding does not increase with a higher penetration of DERs [3] has probably put a brake on concerns from utilities. Experts have also raised concerns that islanding detection may be conflicting with grid support functions such as low voltage ride-through (LVRT) [6-7, 16]. Nonetheless, in the United States, numerous grid codes have simultaneously evolved towards defining islanding detection as a mandatory requirement for all grid-connected inverters.
As of today, the need for inverter-based islanding detection capabilities seems to be no longer questioned. In fact, there has been intense academic research on this topic, leveraging recent signal processing techniques, machine learning, or even artificial intelligence. This is clearly visible in recent reviews [19, 21].
However, despite this attention, the above-mentioned conflicts – as well as other potential conflicts (e.g. with droop and VSG characteristics) – remain insufficiently addressed. Besides, there is only scarce literature on islanding detection for grid-forming inverters [14-17, 21], which also happens to account marginally for the most recent advances in microgrids.
Motivations for islanding detection
The main motivations for islanding detection have always been rooted in the risk of hazard for personnel operating within an undetected island. Extra motivations also exist regarding equipment protection (overvoltage, overcurrent), especially in the case of out-of-phase reclosing.
Islanding detection has however long been subject to active debate regarding:
- Actual risks for personnel, notably as such risks could be mitigated by other measures (e.g. proper indicators, good practice and education, etc. [1]). Some well-informed authors even consider islanding not to increase hazards when compared to planned disconnection [1, 2].
- Equipment protection alone isn’t a sufficient motivation either. Indeed, fast reclosing circuits may already operate faster than what is set as a reasonable delay for islanding detection, namely 2-5s [1].
- The real probability for an island to occur may be very low (see later) [4].
Nowadays, most inverters developed for grid-connected operation seem to be compliant with IEEE1547/IEC62116. Indeed, while this isn’t a mandatory requirement in most countries, compliance to IEEE1547 is required by the majority of grid operators in the US, and compliance to JETGR0003-4-1.0, which imposes similar requirements, is mandatory in Japan [18].
Therefore, even though the motivations and needs remain debatable, islanding detection seems to have become a de-facto mandatory feature for the commercialization of inverters, irrespectively of all the above considerations.
Phenomenology
The possible causes for unintentional islanding are well described in [1], namely:
- A fault that is not detected by the DER, but nonetheless results in the opening of a disconnecting device (e.g. breaker, relay).
- Equipment failure, or accidental opening of a disconnecting device.
- Human error or malicious intent.
The conditions for islanding to form are also clearly stated in [1] in the context of grid-feeding inverters, namely:
- The PV system must be producing nearly exactly the power that is required for the load to operate. This is valid for both the active and reactive power flows.
- The load must be such that its capacitive and inductive components resonate near the nominal grid frequency (50 or 60 Hz).
If both of these conditions aren’t met, islanding cannot occur. Additionally, if these conditions naturally disappear (i.e. power generation or consumption changes), islanding naturally disappears as well (the inverter trips).
However, if both conditions are met and maintained, there exist a risk that the P/Q mismatch isn’t sufficient to push the voltage/frequency conditions seen by the inverter out of bounds, so that the latter (inadequately) maintains operation. The corresponding voltage/frequency range is usually referred to as NDZ (non-detection zone), which shall be minimized or ideally eliminated.
Rephrasing the above, 1) implies that there should be (almost) no current flowing into the circuit breaker when the latter opens. Putting this in perspective with the possible reasons for this breaker to open – with no transient regime on either P or Q – at this exact moment, this may be considered a rather unlikely event. In even stronger terms, [3] even claims that “the probability that balanced conditions are present in the power network and that the power network is disconnected at that exact time is virtually zero.” The authors mention a probability of typically 0.0001% to 0.001%.
Similarly, 2) implies that the load must present a self-resonating frequency that is – very unluckily! – located right inside the acceptable frequency range (e.g. typ. 49-51Hz). No information has been found in the literature regarding how probable would such a fact would be.
Islanding detection methods
Historically, an extensive review of islanding detection techniques was first presented in [2]. However, more recent reviews are now offering a superior overview of the state of the art [19, 21]. Their content can be summarized as follows, focusing on local islanding detection functions (as opposed to remote functions that would require dedicated hardware or communication means). There are essentially two types of techniques:
- Passive methods work by detecting a parameter change (e.g. amplitude, frequency, phase, or harmonics) after the disconnection. Passive methods are relatively robust in multi-converter environments (e.g. low risk of interference between multiple units from multiple manufacturers). However, passive methods may be difficult to tune (selectivity) and cannot reduce the NDZ to zero.
- Active methods work by deliberately generating a disturbance in order to force – if possible – a parameter change that can be detected by a passive method. Active methods can reduce the NDZ and improve selectivity. However, they always degrade power quality somehow and some methods even tend to generate instability. Finally, their behavior may be unpredictable in the presence of multiple inverters.
Passive methods
Based essentially on [2, 20], the following comments can be made:
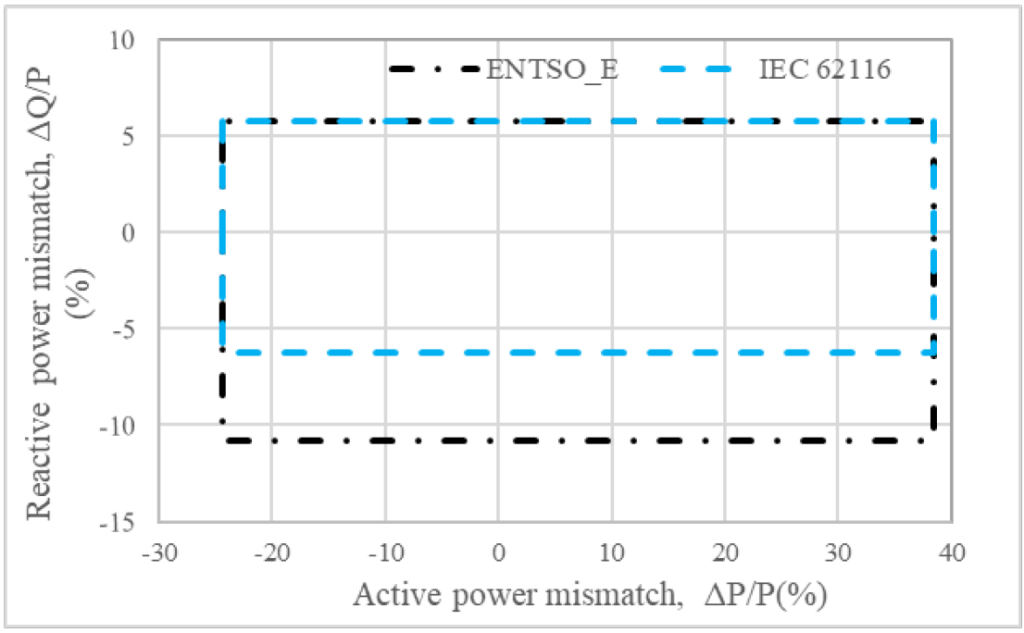
- Over/under voltage and frequency detection (OUV/OUF) is trivial. However, the choice of the trip thresholds is challenging. Too low: there exists a risk of false positive errors. Too high: the NDZ may be too large. Besides, these thresholds are not always freely selectable, notably if based on grid codes (e.g. +10/-15% on voltage and ±1 Hz on frequency). With OUV/OUF alone and such thresholds, the NDZ can be as high as a few tens of percent of the DER’s power ratings [12, 20, 21] (see below):
- Similarly, the tripping of any other protection threshold (e.g. DC bus voltage) also results in the prevention of the island. Their selection is however often already fixed by other concerns.
- Conventional phase angle jump detection is not well suited for operation with modern, fast PLL-based synchronization (unless e.g. two PLLs are implemented). Besides, this technique poses selectivity issues as islanding is hard to discriminate from a load step. Modern variants that use the back-EMF of a (virtual) synchronous generator as a reference phase are elegant [13, 15], but do not solve the selectivity problem.
- The measurement of voltage harmonics is one of the few passive techniques that can perform islanding detection in perfect power balance conditions (zero NDZ). However, the technique lacks selectivity as there might be other reasons for a change in the harmonics (e.g. switching on/off of non-linear loads or other converters).
- Passive methods based on the measurement of the rate of change of frequency (ROCOF) seem to be difficult to tune and prone to false-positive events. However, promising research was shown in combination with an active technique [21].
- The difficult work of tuning thresholds could possibly be alleviated by a “smart” selection of the latter, e.g. thanks to smart decision trees, ANN, fuzzy logic, artificial intelligence, etc. These techniques however require significant implementation efforts as well as impose a high computational burden. An extensive review of the possible variants is given in [21].
In principle, all passive islanding detection techniques apply to grid forming (GFM) inverters. However, as notably shown in [15], only the techniques relying on phase angle jump and ROCOF seem to have attracted academic attention.
Active methods
Active islanding detection methods play with the injected current. There are two sub-categories:
- Harmonic injection methods. Such methods aim at identifying a change of impedance at the point of connection. The following comments can be made:
- Among the various techniques, the injection of a second-order harmonic seems to be the most popular one.
- Impedance detection is either algorithmically complex (e.g. analysis of the switching harmonics), or prone to unwanted interactions with other devices (non-linear loads, other inverters, etc.).
- None of these methods offer a truly attractive balance of interests between NDZ, selectivity, power quality degradation, algorithmic complexity, and suitability for operation with multiple inverters [21].
- Positive feedback methods. These methods attempt to destabilize the island to drive the frequency or voltage away from the acceptable range and trigger a passive islanding detection method. For that, they implement some sort of positive feedback loop. This is well explained in [9]. Based on [2, 20, 21], the following comments can be made:
- Historical methods such as the Active Frequency Drift (AFD), Sandia Frequency Shift (SFS), and similar methods – i.e. operating with a distorted current waveform – were designed with single-phase applications in mind and for unity power factor operation, without PLLs. Nowadays, with modern DQ-type current control, their implementation is unreasonably difficult (or at least not without some adaptation and extrapolation). These techniques seem to have lost academic interest since approximately 2015.
- The Slip-mode Frequency Shift (SMS) controls the phase angle of the injected current as a function of the measured frequency. In other words, it injects a variable amount of reactive power. SMS seems to be a popular method, with no clear drawback.
- Various types of reactive power injection schemes are possible [11, 14, 17, 18], essentially following a f(Q) or Q(f) curve with positive feedback. These techniques seem simple and effective and are somewhat functionally equivalent to SMS. Here again, no clear drawbacks of these techniques seem to have been reported in the literature. Some recent variants such as [10, 22] even try to further minimize the impact on power quality by injecting a zero-average amount of Q (but at the risk of canceling effects in multi-converter systems).
Performance evaluation
Test scenario
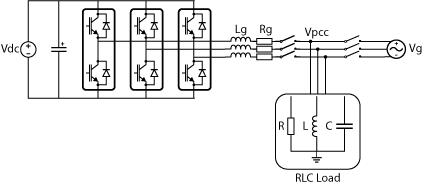
The test bench proposed by IEEE1547 (and essentially copied by IEC62116) consists of a single inverter connected to a passive parallel RLC load, which becomes suddenly disconnected from a grid (often an emulator). The load parameters are defined such that P and Q are identical to the power produced by the DER power at the time of disconnection, and that the quality factor is exactly 1.
This testing configuration seems to be widely accepted. It is also quite similar to the corresponding Japanese standard, which differs by only adding a small induction motor (150W). However, in all cases, as the expected phenomenology heavily relies on the validity of the swing equation, the relevance of this procedure may be questioned, notably as:
- The reported performance of existing islanding detection methods varies significantly with various quality factors, while only a quality factor of 1 is actually tested.
- The possible presence of non-linear loads and/or other inverters is not accounted for.
- The possible presence of inertia (real or virtual) is not accounted for.
- It is assumed that all other dynamics can be neglected (e.g. power flow variations, DC bus dynamics, etc.), which is perhaps a reasonable assumption for PV inverters, but not generally true over a 2s interval.
Overall, as a note, experimentally validating any islanding detection method is therefore a challenging task, which arguably shouldn’t solely rely on IEEE1547. While guaranteeing that a given method will work in 100% of cases is probably nearly impossible, testing may probably be addressed as a function of the maximum acceptable marginal risk of islanding in a given configuration.
Performance criteria
While many references such as [2, 21] only evaluate the size of the NDZ, [20] also suggests considering:
- Reliability: tolerance to strong/weak grid and low/high penetration of ditributed generation.
- Selectivity: minimize false-positive and false-negative errors.
- Minimum perturbation: minimize the impact on power quality.
The question of how much importance should be given to each of these aspects has however only received little attention. Also, surprisingly, the detection time is often used as a performance criterion, although standards only apply a pass/fail evaluation.
Existing challenges and ongoing research
Compatibility with LVRT requirements
At first, some voices raised, mentioning that islanding detection may be conflicting with grid support functions such as Low-Voltage Ride-Through (LVRT) [6]. However, later investigations, notably reported in [1], show no significant adverse effects of LVRT capabilities on islanding detection.
Nowadays, LVRT and islanding detection are specified together in the IEEE1547 standard.
Conflicts between active islanding detection methods and grid support functions
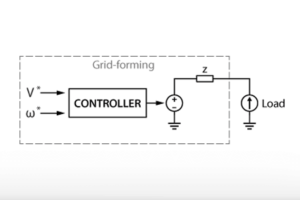
When grid support or even grid forming functions are available, two scenarios can be distinguished:
- Only grid support capabilities are desired. Islanding remains undesirable and should be detected.
- Islanding isn’t necessarily a problem, or could even be desirable (e.g. in backup power applications). Then, inverters must either switch from feeding to forming mode once islanding is detected, or continuously support the grid from the start (possibly preferable as fast islanding detection is then unnecessary).
In both cases, grid voltage or frequency support functions are designed to improve stability. Going further, the grid-forming capability is even specifically aimed at creating or maintaining islanded operation. Therefore, these functions have – by essence – objectives that are the exact opposite of most active islanding detection techniques, namely stabilizing instead of destabilizing the grid. This applies to the GFM inverters themselves, but also to conventional feeding inverters in the presence of GFMs. This contradiction is well commented in [16].
As a result, [6] mentions that “nearly all of these methods can be compromised” if there are (virtual) synchronous generator (VSG) capabilities in the island. Similarly, [17] shows that the addition of a GFM inverter next to the inverter under test results in the failure of all islanding detection tests.
While this conflict is widely recognized in the literature [14, 16-17], no consensus seems to exist, however, regarding how to resolve it:
- [16] presents a methodology for designing SMS parameters that are simultaneously compatible with both islanding detection and grid-forming operation. However, although successful operation of islanding detection is shown (simulation only), the negative impact on grid support functions is not evaluated.
- [17] shows that a negative droop -Q(f) (positive feedback loop) can be added to a given GFM inverter so as not to prevent, but rather facilitate, the islanding detection capability already present in other (feeding) inverters. This method is in fact identical to that already presented in [9] and the Japanese standard JETGR0003-4-1.0 [18]. No information is however given here either regarding the stability degradation in grid-connected mode.
Therefore, based on the above-presented review, the topic of islanding detection for grid-forming converters seem to leave at least the following questions unanswered:
- Could islanding be deemed acceptable in the presence of grid-forming inverters (e.g. provided that the operating conditions can be guaranteed to be safe and that the islanding condition is properly identified)?
- If some degradation of the grid support functions is a necessary trade-off for supporting islanding detection, how much of this degradation can be considered reasonable?
- In the presence of GFMs, should islanding detection be the sole responsibility of these specific inverters, or is it required that other (feeding) inverters are still able to perform islanding detection?
- In case only a few GFMs are present in the potential island, how could it be possible – even theoretically – to distinguish the loss of grid versus the loss of a GFM inverter of comparable capacity.
- Why are non-destabilizing techniques not attracting more research attention with GFMs (e.g. harmonic- or impedance-based islanding detection techniques)?
Conclusions
The reviewed literature has revealed that the development of islanding detection finds its origin in domestic PV applications in relation to concerns emanating from utilities. Twenty-five years later, it appears that grid operators may have been excessively worried about both the probability and risks set by islanding. Simultaneously, the scientific community may have been overestimating the risks of hazards for personnel operating on the potential island.
Despite that, islanding detection seems to have nonetheless become a de-facto mandatory feature for grid-connected inverters, mostly driven by US and Japanese standards. In practice, although islanding detection is not a necessary feature in most countries, the majority of inverters seem to be developed and tested today in a scenario identical to or close to that of IEEE1547. However, surprisingly, the test conditions set by IEEE1547 (and similar) seems to receive only little attention, although there are serious reasons for questioning their relevance for state-of-the-art applications, especially with microgrids. Experimentally validating an islanding detection method is, therefore, a challenging task, which arguably shouldn’t solely rely on IEEE1547.
Passive, active, and hybrid methods have been reviewed for the local, communication-less detection of islanding. Passive techniques cannot reduce the non-detection zone (NDZ) to zero. Therefore, active techniques are generally preferred instead, although they necessarily degrade the power quality somehow. Apparently, most commercial inverters today use some variants of active techniques. Hybrid techniques, which only activate a perturbation once islanding is suspected, can help reduce the time during which the perturbation is generated. They, however, require a passive method as a trigger, most of which have a non-zero NDZ.
Over the past 30 years, the evolution of inverter control and signal processing techniques has made the first contributions now somewhat irrelevant. Simultaneously, more advanced and complex techniques have also been proposed. However, the very low probability and limited consequences of islanding may have been slightly forgotten when evaluating trade-offs with complexity or power quality and stability. As such, in our opinion, minimum perturbation is all the more important that islanding detection is only marginally useful.
As of April 2025, islanding detection for grid-forming inverters is still an emerging topic. Indeed, only very few publications are available. In principle, all passive techniques designed for grid-feeding applications also apply to grid-forming inverters. However, passive methods alone still present an NDZ or suffer from selectivity problems. In the reviewed literature, only the techniques relying on phase angle jump and ROCOF seem to have attracted academic attention. Active methods are also applicable to inverters featuring grid support or forming functions. However, since it is impossible to both stabilize and destabilize the grid at the same time, conflicts seem inevitable.
Recommended references on islanding detection
[1] D. Narang, S. Gonzalez, and M. Ingram, “A Primer on the Unintentional Islanding Protection Requirement in IEEE Std 1547-2018”, White Paper, NREL, Golden (CO), April 2022.
[2] W. Bower and M. Ropp, “Evaluation of Islanding Detection Methods for Photovoltaic Utility-interactive Systems”, Technical Report (Task V), Sandia National Laboratories, Albuquerque (NM), March 2022.
[3] B. Verhoeven, “Probability of Islanding in Utility Networks due to Grid-connected Photovoltaic Power Systems”, Technical Report, KEMA Laboratories, Arnhem, September 2022.
[4] M. Ropp, and A. Ellis, “Suggested Guidelines for Assessment of DG Unintentional Islanding Risk”, Technical Report, Sandia National Laboratories, Albuquerques (NM), March 2013.
[5] M. Ropp, M. Bregovic and A. Rohatgi, “Prevention of Islanding in Grid-connected Photovoltaic Systems”, in Progress in Photovoltaics: Research and Applications, Wiley, 1999, pp. 39-59.
[6] S. Gonzalez, G. Kern, and M. Ropp, “Loss of Utility Detection Capabilities for Today’s Utility-interconnected Photovoltaic Inverters”, in Proc. of PVSC Conferene, Washington, 2017.
[7] M. Ropp, D. Schultz, J. Neely, S. Gonzalez, “Effect of Grid Support Functions and VRT/FRT Capability on Autonomous Anti-islanding schemes in Photovoltaic Converters”, in Proc. PVSC Conference, Portland, 2016.
[8] A. Lohmann, E. Romaneli, A. Badin, “Performance Analysis of GEFS and GEVS Anti-Islanding Methods for Three-phase Grid-connected Photovoltaic Systems”, in Proc. INDUSCON Conference, Sao Paolo, 2018.
[9] Z. Ye, R. Walling, L. Garces, R. Zhou, L. Li, and T. Wang, “Study and Development of Anti-Islanding Control for Grid-Connected Inverters”, Technical Report, NREL, Golden (CO), May 2004.
[10] X. Chen, Y. Li, P. Crossley, “A Novel Hybrid Islanding Detection Method for Grid-Connected Microgrids With Multiple Inverter-Based Distributed Generators Based on Adaptive Reactive Power Disturbance and Passive Criteria”, in Trans. of Power Electronics, Sept. 2019.
[11] J. Muñoz, J. Villegas, J. Vite, J. Carrasco, and E. Galvan, “New Low Distortion Q-f Droop Plus Correlation Anti-Islanding Detection Method for Power Converters in Distributed Generation Systems”, in Trans of Ind. Electronics, February 2015.
[12] D. Cañete, S. Martin, M. Garcia, A. Llamazares, and I. Sáez, “An anti-islanding protection based on RoCoF compliant with ENTSO-E and IEC 62116”, in Proc. of ICREPQ Conference, Vigo, 2022.
[13] J. Xing and L. Mu, “A New Passive Islanding Detection Solution Based on Accumulated Phase Angle Drift”, in Journal of Applied Sciences (MDPI), August 2018.
[14] Y. Liu, X. Chen, Z. Chen, X. Shi, L. Lin, and Z. Wang, “[16] J. Xing and L. Mu, “Research on the Effects of Grid-forming Control on Islanding Detection Effectiveness of Distributed Energy Resources”, in Proc. of PEAS Conference, Guangzhou, November 2013.
[15] S. Inamdar, “Passive Island Detection of Microgrid by Grid Forming Inverter”, Master Thesis, Chalmers University of Technology, Gothenburg, November 2022.
[16] T. Liu, X. Wang, F. Liu, K. Xin, and Y. Liu, “Islanding Detection of Grid-Forming Inverters – Mechanism, methods, and challenges”, in IEEE Electrification Magazine, March 2022.
[17] B. Winter, J. Schwung, B. Engel, “Robust Detection Method of Low-voltage Islanding for Grid-forming Inverters Operated in Conjunction with Existing PV Inverters”, in Proc. PVSC Conference, San Juan, June 2023.
[18] A. Ellis, S. Gonzalez, Y. Miyamoto, M. Ropp, D. Schutz, and T. Sato, “Comparative Analysis of Anti-Islanding Requirements and Test Procedures in the United States and Japan”, in Proc. of PVSC Conference, Tampa, February 2014.
[19] J. Cebollero, D. Cañete, S. Martin-Arroyo, M. García, and H. Leite, “A Survey of Islanding Detection Methods for Microgrids and Assessment of Non-Detection Zones in Comparison with Grid Codes”, in Energies Journal (MDPI), January 2022.
[20] A. Cardenas, K. Agbossou, and M. Doumbia, “Performance evaluation of active anti-islanding scheme for multi-inverter DG systems”, in Proc. ICEEE Conference, Prague, May 2010.
[21] E. Resende, M. Simões, and L. Gomes Freitas, “Anti-Islanding Techniques for Integration of Inverter-Based Distributed Energy Resources to the Electric Power System”, in IEEE Access, February 2024.
[22] R. Patekar, D. Pal, and B. Panigrahi, “Event-Triggered Hybrid Anti-Islanding Protection Scheme Based on Q-Axis Disturbance Injection”, in Trans. of Ind. Electronics, June 2024.