SiC- and GaN-related challenges for digital control systems
Five key specifications to look at when selecting a controller for SiC- or GaN-based power converters.
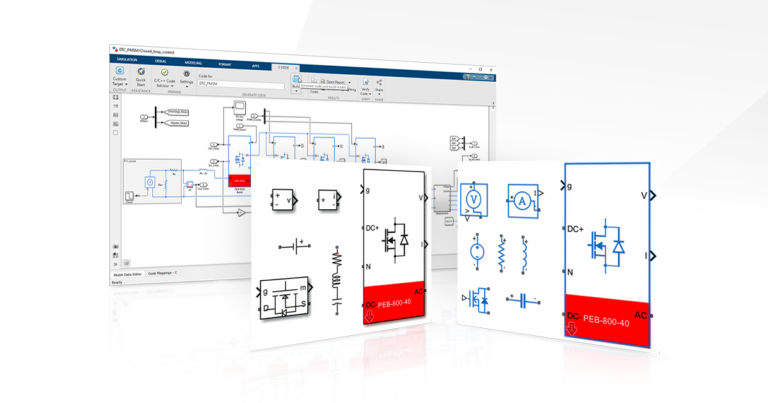
Recent advances in wide-bandgap semiconductors have made Silicon Carbide (SiC) and Gallium Nitride (GaN) increasingly popular and widely adopted in low- to mid-power applications. Simultaneously, engineers are also expressing increasingly demanding needs regarding the equipment around the switches. This trend drives improvements in gate drivers, sensors, auxiliaries, PWM signals generation, as well as the overall digital control system. Indeed, when everything happens 5-10x faster (or more) than with silicon, the entire control stage must keep up!
It is not straightforward to quickly identify the essential specifications for wide-bandgap semiconductor devices. Also, some challenges may remain incompletely addressed by existing digital controllers. In this context, the article provides insight into five specific points worth particular attention.
1) PWM resolution
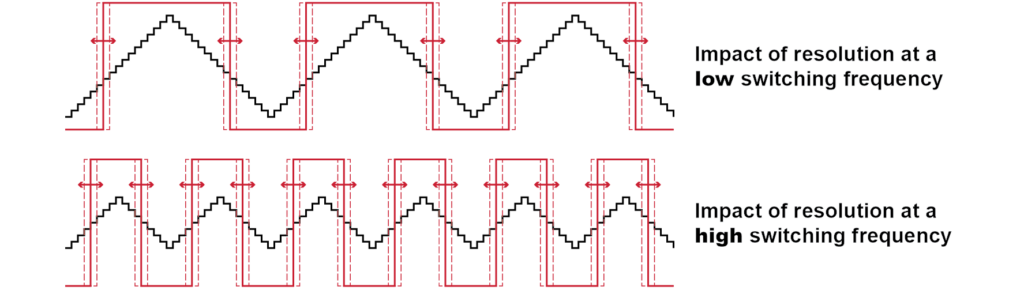
PWM resolution is the smallest increment in pulse width that can be applied to a given PWM signal. This parameter directly affects the accuracy and noise performance of a regulated quantity, similar to the resolution of analog-to-digital conversion.
The higher the switching frequency, the lower the PWM resolution must be to maintain constant performance. Typically, achieving a relative resolution of 10 bits (i.e., 0.1%) at a switching frequency of 2.5kHz requires an absolute PWM resolution of 400 ns. Most modern digital modulators easily exceed this performance. However, achieving the same relative resolution at 250kHz requires an absolute resolution of as little as 4 ns, which is already an outstanding level of performance!
All imperix controllers offer a PWM resolution of 4ns or better. In particular, the high-resolution mode natively implemented in the B-Box 4 can achieve a resolution of down to 250 ps. This performance level is unique among rapid control prototyping systems and is only superseded by specialized ASIC circuits.
2) Timing accuracy of PWM gating signals
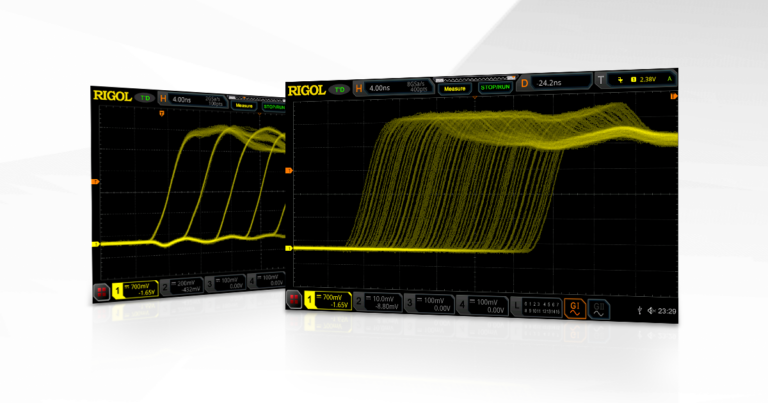
Beyond their resolution, the timing accuracy of PWM signals is notably affected by jitter and skew throughout the signal chain, from the modulator to the power semiconductor gate.
Total jitter is often small in comparison to the PWM resolution. However, skew depends on asymmetries between related signal paths, which may be more significant. They may be due to part-to-part variations or characteristics of the logic circuits themselves. Skew values ranging from a few nanoseconds up to tens of nanoseconds are not uncommon.
When it comes to driving power semiconductors, the faster the devices, the more accurate the driving signals must be. This is mostly constrained by the need to minimize the dead time, which is a well-known source of harmonic distortion (and to a lesser extent, losses). Furthermore, paralleling power semiconductors also requires very accurate driving signals.
As an example, the driving of an imperix PEB8024 power module with a B-Box 3 involves the following timing uncertainties:

In this example, the total estimated worst-case skew is about 83ns, which allows the dead-time to be configured as low as 90-100ns. This is essential to minimize distortion in applications with high switching frequencies. Importantly, the digital controller here contributes only one-sixth of the minimum dead time, providing substantial headroom for more demanding scenarios.
3) Closed-loop control rate
In power electronics, the main constraint on closed-loop control bandwidth is often set by the equivalent actuator delays, which depend on the sampling and switching frequencies. With higher switching frequencies, new harmonic performance levels can be reached. However, to fully benefit from the performance increase, other delays, such as measurement and processing delays, must also be kept under control.
Historically, closed-loop control frequencies above hundreds of kHz were achievable only with specialized FPGA-based systems and highly customized control implementations. Nowadays, Systems on Chip (SoC) such as those inside imperix controllers can also offer minimal latency, with the added benefit of a more straightforward control implementation and debugging. Notably, the B-Box 4 can run control algorithms up to 500kHz inside the CPU.
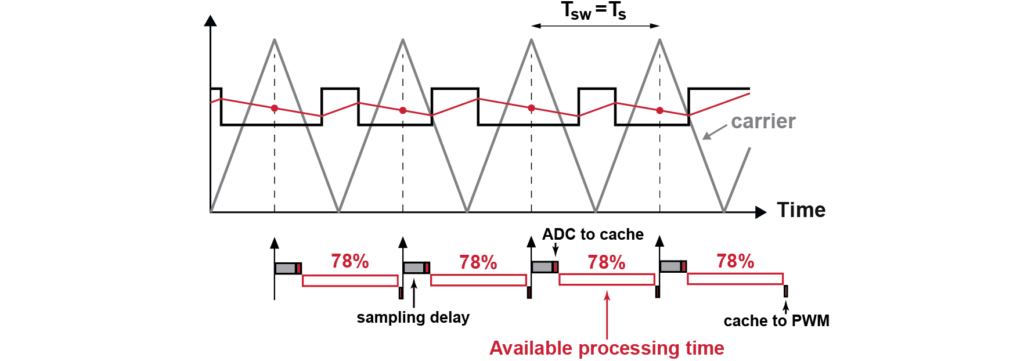
The figure below shows a typical allocation of data transfer delays achieved with a B-Box at 100kHz. The available CPU processing time is about 7.8µs, i.e., 78% of the total PWM period. Other timing configurations are also possible.
4) System-level flexibility and scalability
Modern power electronic systems are increasingly modular. Notably, the limited ratings of today’s wide-bandgap devices encourage their use in a modular fashion to extend the system-level power ratings. This may take the form of simple paralleling or more sophisticated approaches. Anyhow, multiple devices or subsystems are then used together to improve scalability.
This scalability requires the ability to acquire data from multiple sensors and distribute control outputs across several units. In return, it permits addressing design uncertainties during the development phase, enables future system extensions, and fosters reusability across projects. However, most industrial controllers based on monolithic circuit boards cannot provide such flexibility.
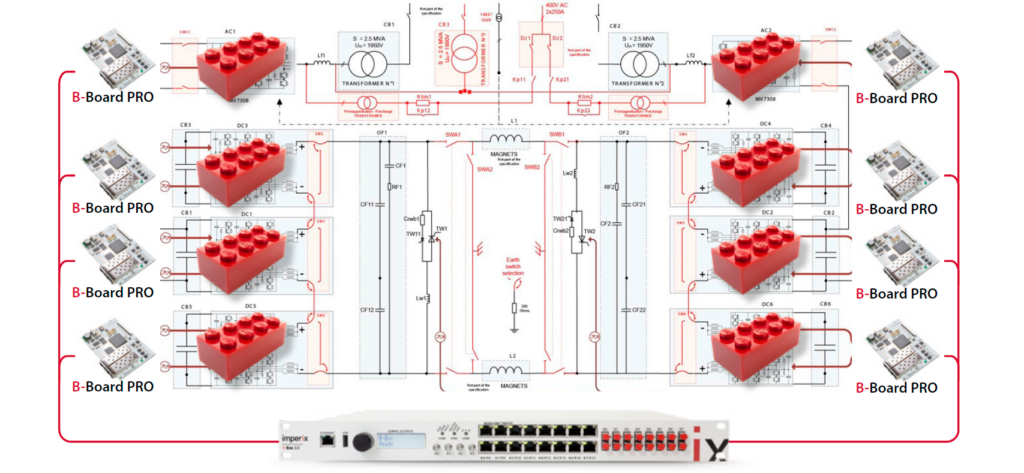
Imperix controllers feature relatively modest I/O capabilities per unit (considering that 24 analog inputs and 48 PWM outputs on the B-Box 4 are modest numbers!). However, they distinguish themselves with excellent performance in networked configurations, thanks to a high-end optical fiber interconnect. This offers tremendous scalability, with support for thousands of inputs and outputs, and guarantees that no system is ever too large or complex. Furthermore, because all related data transfers occur with extremely low latency, users can be assured that the overall system operates transparently, regardless of the networked control structure.
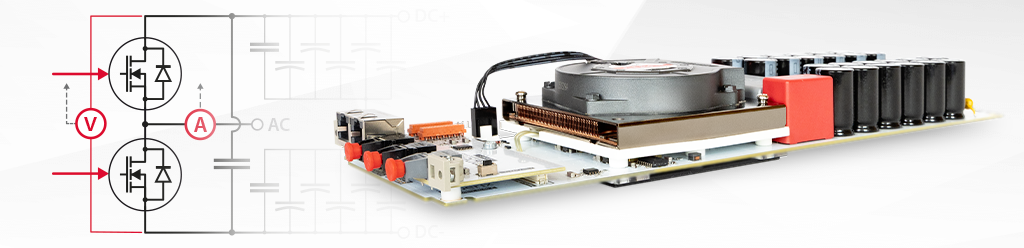
5) Device protection
The primary benefit of the higher switching frequencies enabled by SiC or GaN devices is the potential to reduce the size and weight of their associated passive elements. Transformers, inductors, and filters can indeed be attractively downsized, which also results in smaller time constants and larger current rise rates. Furthermore, as wide-bandgap technology is still evolving, the ruggedness of the devices has not yet reached the level of their silicon counterparts, particularly in short-circuit withstand times, which remain relatively limited.
Altogether, this implies that protective measures must be able to act particularly fast. For device-level protection, this is challenging because desaturation detection must accurately detect the fault in a particularly noisy environment (high dv/dt and di/dt). At the system level, the challenges are similar, once again due to the fast current dynamics.
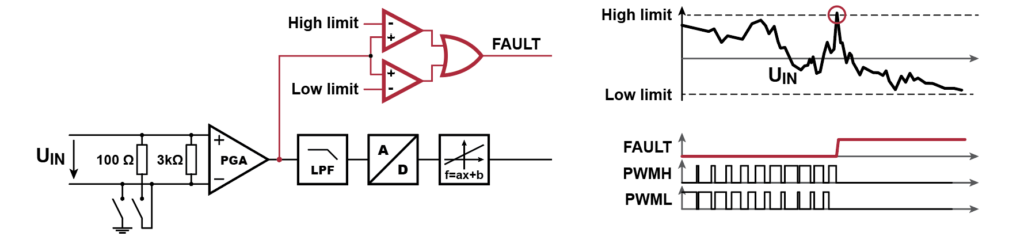
In this context, it is always good to rely on rock-solid protective mechanisms, especially during the research and development phase. This is essential to push and observe the capabilities of SiC devices close to their limits without endangering their integrity. This is why imperix controllers embed software-independent safety mechanisms that can respond as fast as 0.8us from the detection of the overvalue to the blocking of all PWM signals.
Uncompromising hardware safety is just one of the reasons why people choose us for rapid control prototyping.