Table of Contents
This note explains how to compute the discrete control delay of a control algorithm running on an imperix controller, and how to account for it in the controller tuning.
Context
The execution of a digital control algorithm inevitably introduces delays in the control chain. These delays are not only due to the execution time of the algorithm, but also to external factors such as sensor and modulator delays. This overall delay affects the system response and therefore limits the achievable closed-loop control bandwidth. Knowledge of the total delay is therefore crucial for designing and tuning the controller in order to ensure stability and achieve the desired control performance.
For controller design, the various delays involved in the control loop are often lumped together into an equivalent total delay \(T_{d,tot}\) and modeled using a first-order approximation \(1/(1+sT_{d,tot})\). Based on this model, analytical tuning of the controller becomes possible, as further developed in PI controller implementation and illustrated in PI-based current control.
This note explains how to compute \(T_{d,tot}\) in the most common cases.
Definitions of the various delays
The total loop delay is the sum of all the delays involved between the measurement of a state variable and the resulting action of the controller on the controlled plant. The different delays involved are defined below.
| Delay | Symbol | Definition |
|---|---|---|
| Sensing delay | \(T_{d,sens}\) | Delay in the measured quantity, due to finite sensor and analog chain bandwidth, and possibly filtering delay |
| Control delay | \(T_{d,ctrl}\) | Delay between sampling instant and duty-cycle update instant in the PWM modulator (FPGA peripheral) |
| Modulator delay | \(T_{d,PWM}\) | Average delay between duty-cycle update in the PWM modulator and resulting change in modulator output |
| Switching delay | \(T_{d,tran}\) | Delay between a change in the modulator output and the actual switching of the power device (can often be neglected) |
| Total loop delay | \(T_{d,tot}\) | Sum of the above delays, representing the total delay of the control system |

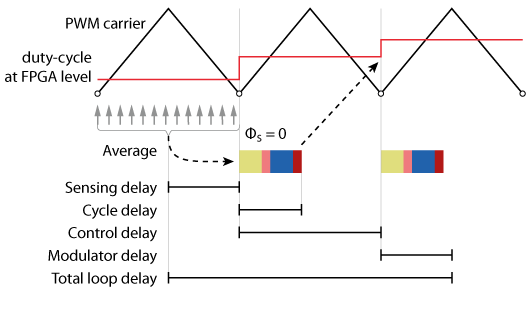
The figure below illustrates the different delays involved with a triangular PWM carrier and single-rate update of the duty-cycle (at the bottom of the carrier).

Sensing delay
The sensing delay \(T_{d,sens}\) includes delays in the sensors as well as in the controller’s analog front-end.
The sensor delay, of course, depends on the sensor, and particularly on its bandwidth \(f_{bw}\). If no value is specified, the delay can typically be assumed to be between \(1/(2\pi f_{bw})\) and \(2/(2\pi f_{bw})\).
In the controller, the delay introduced by the analog front-end is generally negligible (sub-µs). However, a significant delay can be introduced depending on the averaging used:
- Synchronous averaging: the induced delay on ADC channels for which it is enabled is half of the averaging period (i.e., typically half a control period).
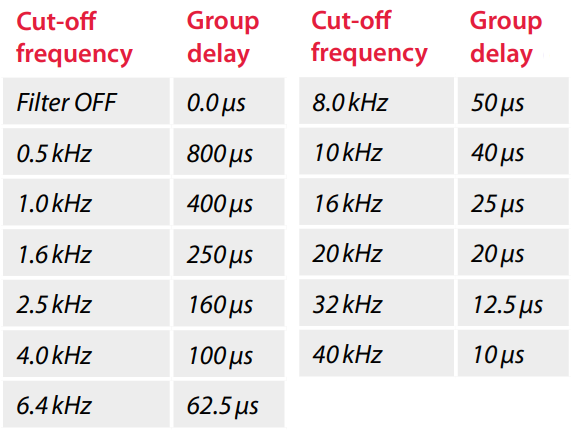
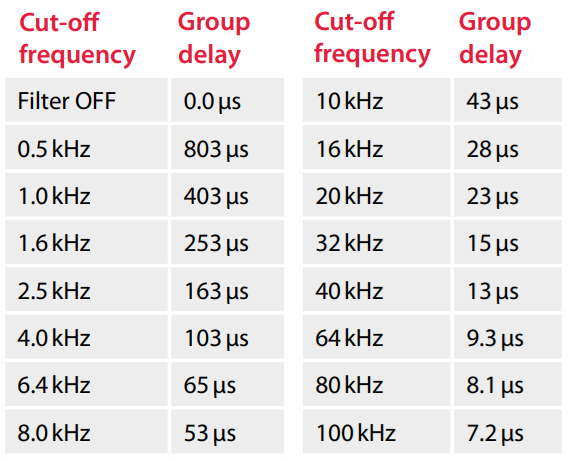
- Low-pass filter (B-Box RCP and B-Box 4 only): the induced delay depends on the selected cutoff frequency (see tables below).
Control delay
The control delay \(T_{d,ctrl}\) is defined as the elapsed time between the sampling instant and the duty-cycle update in the PWM modulator.
Due to the discrete nature of the sampling and PWM update processes, the control delay typically takes values that are fractions or multiples of the control period Ts, such as 0.5Ts, Ts, or 1.5Ts, with its value depending on the relative timing between ADC sampling, controller execution, and PWM register update.
More specifically, its value results from the combination of several delays along the data path, as listed below. The dominant contribution is the processing delay, i.e., the time required for the control interrupt routine to execute. All these delays are measured at runtime and displayed in the Timings tab in Cockpit.
| Delay | Symbol | Definition |
|---|---|---|
| Acquisition delay | \(T_{acq}\) | Delay between sampling and data availability in CPU. = ADC conversion time (ADC) + FPGA-to-CPU transfer time (Read) |
| Processing delay | \(T_{pr}\) | CPU processing time (Proc.) |
| Write delay | \(T_{wr}\) | CPU-to-FPGA transfer time (Write) |
| Cycle delay | \(T_{cy}\) | Delay between sampling instant and newly computed data available in FPGA (\(T_{cy}=T_{acq}+T_{pr}+T_{wr}\), see dedicated section below) |
Acquisition delay
The acquisition delay is the time between the sampling instant and the moment the resulting value becomes available to the CPU. It consists of the ADC conversion time and the transfer of the sampled data from the ADC to the CPU.
The ADC conversion time depends on the specific controller in use and is provided in the table below.
| Device | ADC conversion time |
| B-Box 4 | 0.2 µs |
| B-Box RCP | 2 µs |
| B-Box Micro | 0.5 µs |
| B-Board PRO | 0.5 µs |
| TPI 8032 | 0.5 µs |
The ADC-to-CPU transfer delay depends mainly on the number of ADC channels being read. That delay can be observed in the Timings tab of Cockpit.
Processing and cycle delays
The cycle delay comprises the whole chain of delays: acquisition, processing, and FPGA transfer. For any code running on an imperix controller, its value can be displayed in the Timings tab of Cockpit.
Its value depends mainly on processing delay, which depends on the complexity of the executed control algorithm and is thus application-dependent. For example, the control of the PV boost and three-phase grid-tied inverter (AN006) gives the following figures:
- Acquisition delay \(T_{acq}\): 2.072 µs (includes 2 µs ADC delay in B-Box RCP)
- Processing delay \(T_{pr}\): 3.9 µs
- Write delay \(T_{wr}\): 0.1 µs
- Cycle delay (total) \(T_{cy}\): 6 µs
Modulator delay
Most previously defined delays are straightforward and hardware-dependent. However, the modulator delay requires further clarification, as it varies according to the PWM peripheral parameters. Technically, this delay represents the time elapsed between the moment a new duty cycle is registered and the moment it is reflected in the PWM output pulse. Since this duration varies with the duty cycle itself, a statistical average is typically used for modeling purposes.
Sawtooth carrier
It is quite straightforward that the sawtooth carrier introduces a delay that depends on the duty-cycle \(d\) and the switching period \(T_{sw}\). From the figure below, we can deduce that the delay is
- Sawtooth carrier: \(T_{d,\text{PWM}}=dT_{sw}\)
- Inverted sawtooth carrier: \(T_{d,\text{PWM}}=(1-d)T_{sw}\)
For controller tuning, the average value \(T_{d,\text{PWM}}=T_{sw}/2\) is generally used, for both sawtooth carrier shapes.

Triangular carrier
The modulator delay calculation is more complex with a triangular carrier, since both rising and falling edges of the PWM signal are affected by the duty-cycle value.
A small-signal approximation introduced in [1] and further developed in [2] shows that \(T_{d,\text{PWM}}=T_{sw}/2\) for single-rate update.
Intuitively, the duty-cycle update has an effect on two PWM edges: before and after the half of the carrier, resulting, on average, in an effect after half a switching period [1]. This also means that the delay is identical for triangular and inverted triangular carriers.
With double-rate update, the modulator delay is reduced to \(T_{d,\text{PWM}}=T_{sw}/4\) [1], providing that the sampling is also performed at double rate (double-rate sampling, \(T_s=T_{sw}/2\)).

Direct output PWM
If no PWM modulator is used (e.g. when using the DO-PWM – Direct output PWM peripheral), the modulator delay is obviously \(T_{d,\text{PWM}}=0\). In this case, the firing signal is updated as soon as a new value is available at the FPGA level, meaning that \(T_{d,ctrl}=T_{cy}\).
Examples of delay calculation
Single-rate update with synchronous averaging
Let us consider the following configuration, which is the default configuration with imperix controllers:
- The switching and sampling periods are the same \(T_{sw}=T_{s}\).
- The sampling phase is \(\phi_{s}=0\), which also defines when the interrupt is triggered.
- All ADC channels use synchronous averaging.
- The PWM modulator uses a triangular carrier with a phase of zero and single-rate update (i.e. update at the bottom of the carrier).
- The current sensor bandwidth is 200 kHz.
In this case, the total loop delay is computed as follows:
- Sensing delay: \(T_{d,sens}= T_s/2\) (due to averaging)
- Control delay: \(T_{d,ctrl} = T_s\)
- Modulator delay: \(T_{d,\text{PWM}}=T_{sw}/2\) (triangular carrier)
- Switching delay: neglected, sub-microsecond
- Total loop delay: \(T_{d,tot}=T_{d,sens}+T_{d,ctrl}+T_{d,\text{PWM}}=2T_s\)
Single-rate update with synchronous sampling
Let us consider the following standard configuration:
- The switching and sampling periods are the same \(T_{sw}=T_{s}\).
- The sampling phase is \(\phi_{s}=0.5\) to ensure sampling in the middle of the current ripples.
- The PWM modulator uses a triangular carrier with a phase of zero and single-rate update (i.e. update at the bottom of the carrier).
- The current sensor bandwidth is 200 kHz.
In this case, the total loop delay is computed as follows:
- Sensing delay: neglected (\(\approx 800\,\text{ns}\))
- Control delay: \(T_{d,ctrl} = 0.5T_s\)
- Modulator delay: \(T_{d,\text{PWM}}=T_{sw}/2\) (triangular carrier)
- Switching delay: neglected, sub-microsecond
- Total loop delay: \(T_{d,tot}=T_{d,ctrl}+T_{d,\text{PWM}}=T_s\)
Regular control algorithm
In this first case, we assume that the control algorithm can be executed fast enough, so that the cycle delay is shorter than half a control period (\(T_{cy} < 0.5T_s\)). This is the case for most control implementations running on imperix controllers.
In this case, the total loop delay is computed as follows:
- Sensing delay: neglected (\(\approx 800\,\text{ns}\))
- Control delay: \(T_{d,ctrl} = T_s/2\)
- Modulator delay: \(T_{d,\text{PWM}}=T_{sw}/2\) (triangular carrier)
- Switching delay: neglected, sub-microsecond
- Total loop delay: \(T_{d,tot}=T_{d,ctrl}+T_{d,\text{PWM}}=T_s\)

Heavy control algorithm
Now let’s assume that the control algorithm is heavy and the cycle delay is longer than half a control period (\(T_{cy} \geq 0.5T_s\)).
In this case, the total loop delay is computed as follows:
- Sensing delay: neglected (\(\approx 800\,\text{ns}\))
- Control delay: \(T_{d,ctrl} = 1.5T_s\)
- Modulator delay: \(T_{d,\text{PWM}}=T_{sw}/2\) (triangular carrier)
- Switching delay: neglected, sub-microsecond
- Total loop delay: \(T_{d,tot}=T_{d,ctrl}+T_{d,\text{PWM}}=2T_s\)

General case
With single-rate update and triangular carrier, the total loop delay can take two values:
- If \(T_{cy} < (1-\phi_s)T_s\), \(T_{d,ctrl} = (1-\phi_s)T_s\) and \(T_{d,tot}=(1.5-\phi_s)T_s \)
- If \(T_{cy} \geq (1-\phi_s)T_s\), \(T_{d,ctrl} = (2-\phi_s)T_s\) and \(T_{d,tot}=(2.5-\phi_s)T_s\)
These results suggest that the smaller the sampling phase, the smaller the delay. However, the choice of the sampling phase should also rely on current ripple sampling considerations. Generally speaking, the choice of the sampling phase is a trade-off between control bandwidth and the accuracy of the control.
Double-rate update with synchronous sampling
Now, let us consider the following configuration:
- The switching and sampling periods are \(T_{sw}=2T_{s}\) (double-rate sampling).
- The sampling phase is \(\phi_{s}=0\).
- The PWM modulator uses a triangular carrier with a phase of zero and double-rate update (update at the top and bottom of the carrier).
- The current sensor bandwidth is 200 kHz.
In this case, the total loop delay does not depend on the execution time of the algorithm, unlike with single-rate update. It is computed as follows:
- Sensing delay: neglected (\(\approx 800\,\text{ns}\))
- Control delay: \(T_{d,ctrl}=T_s\)
- Modulator delay: \(T_{d,\text{PWM}}=T_{sw}/4=T_s/2\) (triangular carrier with double-rate update)
- Switching delay: neglected, sub-microsecond
- Total loop delay: \(T_{d,tot}=T_{d,ctrl}+T_{d,\text{PWM}}=1.5T_s\)

References
[1] D. M. Van de Sype, K. De Gusseme, A. P. Van den Bossche and J. A. Melkebeek, “Small-signal Laplace-domain analysis of uniformly-sampled pulse-width modulators,” 2004 IEEE 35th Annual Power Electronics Specialists Conference, Aachen, Germany, 2004, pp. 4292-4298 Vol.6.
[2] S. Buso and P. Mattavelli, “Digital Control in Power Electronics”, 2006.

