Selective Harmonic Elimination for medium voltage drives
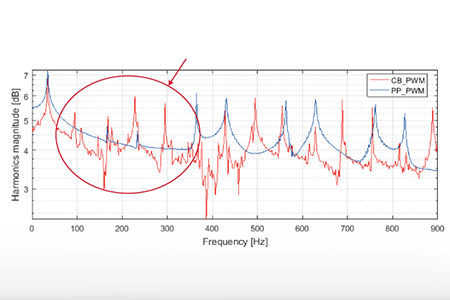
This page presents an implementation example of Selective Harmonic Elimination (SHE) using the PP-PWM modulator. This example addresses a high-power 3-level NPC inverter tied to…
This page presents an implementation example of Selective Harmonic Elimination (SHE) using the PP-PWM modulator. This example addresses a high-power 3-level NPC inverter tied to…

The FPGA-based PP-PWM (programmed pulse pattern) peripheral provides a specialized PWM scheme for two and three-level inverters, which relies on pre-computed pulse patterns. This type…
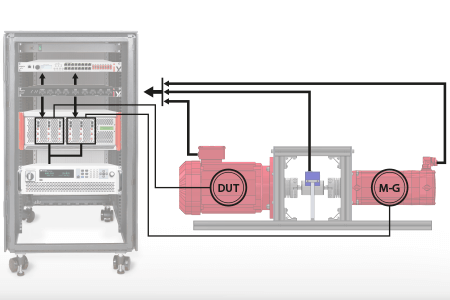
This page gives an overview of possible variable speed drive (VSD) configurations and how to implement them using imperix solutions. Thanks to a modular approach,…
The brake (BRK) block provides access to the brake control unit of the Motor Interface for B-Box RCP. The Motor Interface for B-Box RCP features a brake…
The torque sensor (TRQ) block reads the voltage output of a torque sensor and converts it to torque. It targets drive applications. The B-Box RCP…
The temperature sensor (TMP) block provides access to the temperature measurement from a PT100 or PT1000 sensor for drive applications. The B-Box RCP supports up…
The sin/cos encoder (S/C) block retrieves the Sine and Cosine signals of a sin/cos encoder connected to the Motor Interface. The B-Box RCP supports up…
The hall sensor interface (HAL) block provides access to the commutation signals from Hall effect sensors of a brushless DC motor. The B-Box RCP supports…
The resolver interface block decodes the feedback from a resolver and provides the position of the rotor for drive applications. The B-Box RCP supports up…
The incremental encoder interface (INC) block decodes the A, B, Z signals from an incremental encoder for motor drive applications. The B-Box supports up to…
End of content
End of content