Table of Contents
The torque sensor (TRQ) block reads the voltage output of a torque sensor and converts it to torque. It targets drive applications.
The B-Box RCP supports a single torque sensor through the Motor Interface for B-Box RCP. The sensor’s output must be a voltage proportional to the applied torque. The TRQ block will then read the input voltage and convert it to torque, using the specified sensitivity and offset of the sensor.
The TRQ block is available starting from version 3.7.1.4 of the SDK. The Motor Interface for B-Box RCP is required to use this driver.
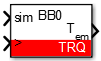
Simulink block
Signal specification
- The output signal is the measured torque in [Nm].
- The
siminput signal is used in simulation and represents the actual torque, computed by the simulation plant model. - The
>input signal needs to be connected to the sampling clock generated by the CONFIG block to account for the exact sampling instant in simulation.
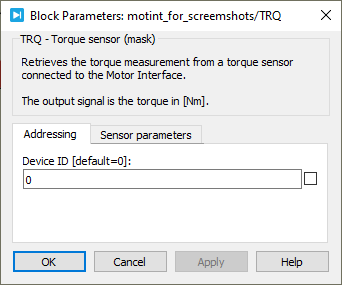
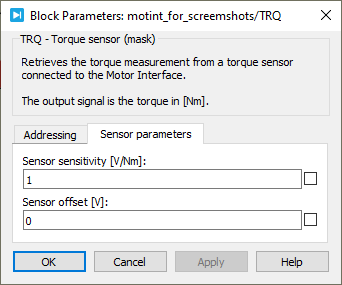
Parameters
Device IDselects which B-Box/B-Board to address when used in a multi-device configuration.Sensor sensitivity [V/Nm]defines the sensitivity of the sensor.Sensor offset [V]defines the voltage offset of the sensor.
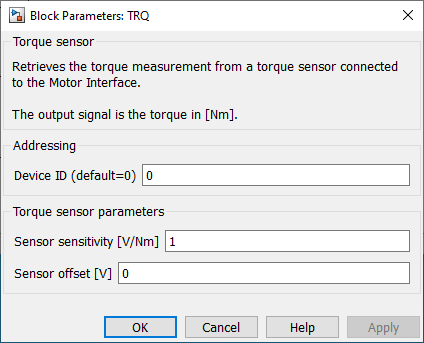
PLECS block
Signal specification
- The output signal is the measured torque in [Nm].
- The
siminput signal is used in simulation and represents the actual torque, computed by the simulation plant model. - The
>input signal needs to be connected to the sampling clock generated by the CONFIG block to account for the exact sampling instant in simulation.

Parameters
Device IDselects which B-Box/B-Board to address when used in a multi-device configuration.Sensor sensitivity [V/Nm]defines the sensitivity of the sensor.Sensor offset [V]defines the voltage offset of the sensor.