Table of Contents
The brake (BRK) block provides access to the brake control unit of the Motor Interface for B-Box RCP.
The Motor Interface for B-Box RCP features a brake control unit that delivers a 24 Vdc command. The brake is expected to be active by default and released by energizing its coil. Depending on the model, the DC command directly energizes the coil. However, many brakes require an AC power supply combined with a rectifier. In the latter case, the 24 Vdc command enables an AC relay. Please refer to the datasheet for more details.
The BRK block is available starting from version 3.7.1.4 of the SDK. The Motor Interface for B-Box RCP is required to use this driver.
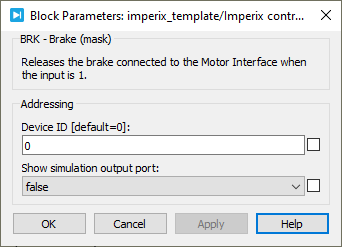
Simulink block
Signal specification
- The input signal is a Boolean command signal to release the brake (‘1’ = release).
- The block has an optional output to display the status of the brake in simulation. It is ignored in code generation mode.

Parameters
Device IDselects which B-Box/B-Board to address when used in a multi-device configuration.Show simulation output portdefines if the ‘release’ signal is fed through to the output port in simulation. In code generation mode, the output port is ignored.
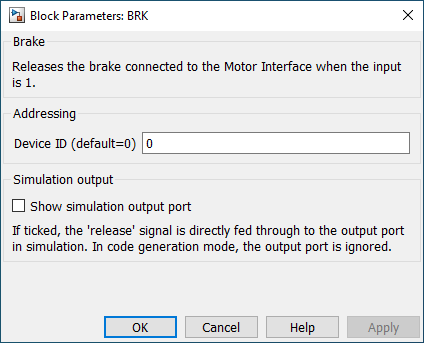
PLECS block
Signal specification
- The input signal is a Boolean command signal to release the brake (‘1’ = release).
- The block has an optional output to display the status of the brake in simulation. It is ignored in code generation mode.

Parameters
Device IDselects which B-Box/B-Board to address when used in a multi-device configuration.Show simulation output portdefines if the ‘release’ signal is fed through to the output port in simulation. In code generation mode, the output port is ignored.