Getting started with the imperix ACG SDK
This article provides getting-started instructions for first-time users of the imperix ACG SDK. It focuses on the typical workflow associated with the simulation and automated…
This article provides getting-started instructions for first-time users of the imperix ACG SDK. It focuses on the typical workflow associated with the simulation and automated…

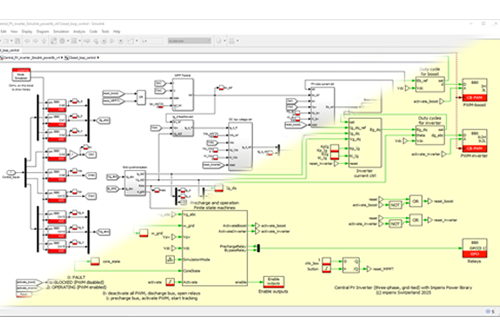
The ACG SDK blocksets for Simulink and PLECS contain blocks specific to the all-in-one programmable inverter (TPI8032 22kW). These wrappers simplify the use of usual blocks,…

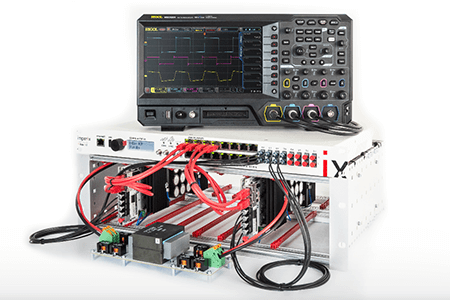
This document provides guidance to first-time users regarding the essential procedures for deploying code to imperix controllers, as well as connecting with the equipment. It…
The User fault block is used to stop the converter operation from the user model. It makes the controller enters the FAULT state (user fault)…
This block writes a user-defined message in the log module of Cockpit. Numerical values can be inserted into the message using the conversion specifier “%f“,…
This page covers a possible control algorithm for controlling the secondary DC voltage of a DAB converter. A working prototype is built using PEH full-bridge…
The “dq0 to Alpha-Beta-Zero” converts a space vector from a rotating (dq0) to a stationary (αβ0) reference frame. The angle of the rotating reference frame…
The “Alpha-Beta-Zero to dq0” block converts a space vector from a stationary (αβ0) to a rotating reference frame (dq0). The angle of the rotating reference…
The “Alpha-Beta-Zero to abc” block computes a three-phase (abc) signal from a space vector in a stationary reference frame (αβ0). The transformation is performed using…
The “adc to Alpha-Beta-Zero” block computes the coordinates of a three-phase (abc) signal in a stationary reference frame (αβ0). The transformation is performed using the…
End of content
End of content