Using the angle decoder modules
This document provides instructions on how to interface an incremental encoder with a B-Box RCP or a B-Board PRO and how to read the motor…
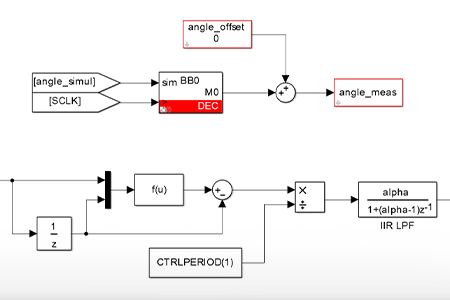
This document provides instructions on how to interface an incremental encoder with a B-Box RCP or a B-Board PRO and how to read the motor…
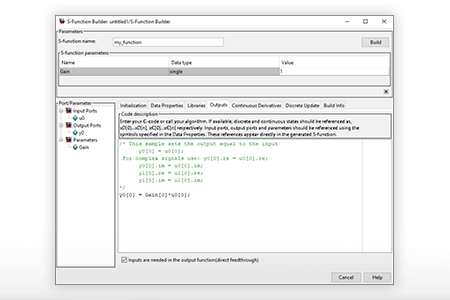
This note provides instructions for integrating C code into a control algorithm developed using the ACG SDK via S-Functions, which is probably the best way…
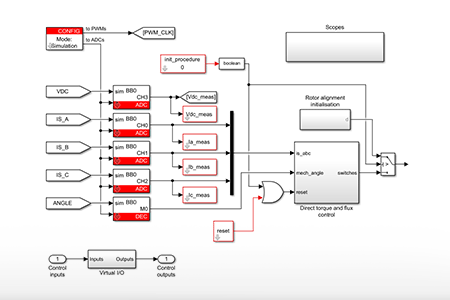
This note provides tips and tricks on how to speed up Simulink simulation. 1) Avoid unnecessary continuous signals The control algorithm should be executed at…
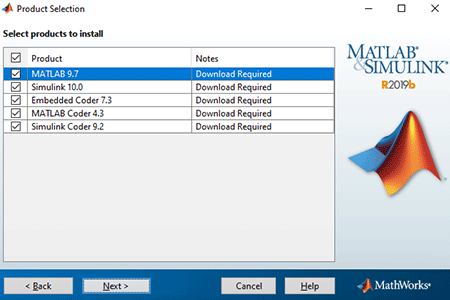
This note gives step-by-step instructions to install the Software Development Kit (SDK) for the Automated Code Generation (ACG) from Simulink and PLECS. Recommended articles related…
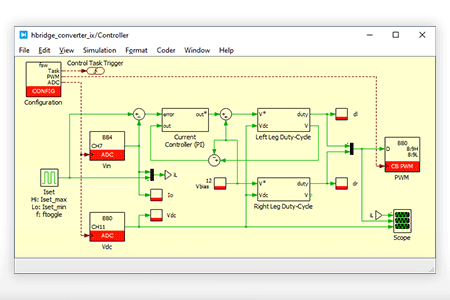
This note provides in-depth content for an accurate and efficient offline simulation of an imperix controller and the corresponding plant model using ACG SDK on Simulink. Because…
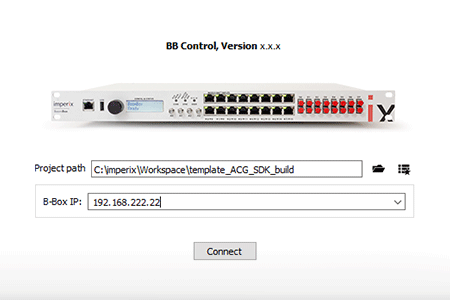
This note explains how to build, load, and execute the control code that is generated from Simulink, PLECS or imperix IDE (C/C++ code). It notably…
This page contains a few code examples that can be used to explore and test imperix’s automated code generation workflow using PLECS. These examples are…
End of content
End of content