Enable PWM outputs
This block issues a request to enable or disable the PWM outputs, similar to the “Enable outputs” button of BB Control utility software. It issues…

This block issues a request to enable or disable the PWM outputs, similar to the “Enable outputs” button of BB Control utility software. It issues…
The SV-PWM block generates PWM signals based on the Space Vector Modulation (SVM) algorithm. This algorithm determines the three vectors that are the closest to…
The FPGA sandbox PWM block allows driving the PWM output from a user-made modulator from within the FPGA. Information on FPGA edition is available on Editing…
The Direct output PWM block sets PWM output(s) directly to ‘0’ or ‘1’. This technique is typically used for Model Predictive Control (TN162) or Direct…
The Carrier-based PWM block generates PWM signals based on one of the 4 carrier shape illustrated below: triangle, sawtooth, inverted triangle, inverted sawtooth. When using…
The Pulse Width Modulators (PWM) share the dead-time generation and the activate/deactivate features, configured through the output mode, deadtime, and activate parameters. The said PWM…
The angle decoder (DEC) block decodes quadrature-encoded signals produced by incremental encoders for motor drive applications. The imperix controllers provide decoder inputs for quadrature-encoder speed/position…
Imperix controllers feature 4 clock generators, CLK0, CLK1, CLK2 and CLK3, running at 250 MHz. They provide time bases for FPGA resources such as the…
The CONFIG block primarily serves to configure the main clock (CLK0) as well as its derivatives. Together, these clocks define the frequency and phase of…
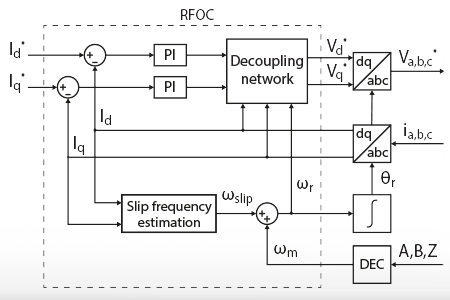
This note covers the rotor field-oriented control of an induction machine and its implementation on a user-configurable voltage-source inverter.
End of content
End of content