Active Front End (AFE)
This technical note introduces the working principle of an Active Front End (AFE) and presents an implementation example built with the TPI 8032 programmable inverter. The…
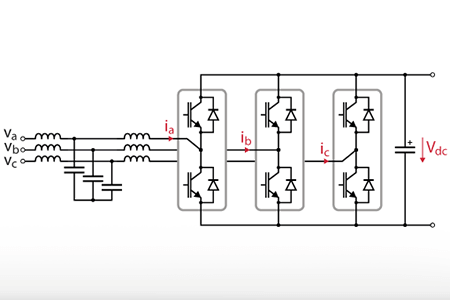
This technical note introduces the working principle of an Active Front End (AFE) and presents an implementation example built with the TPI 8032 programmable inverter. The…
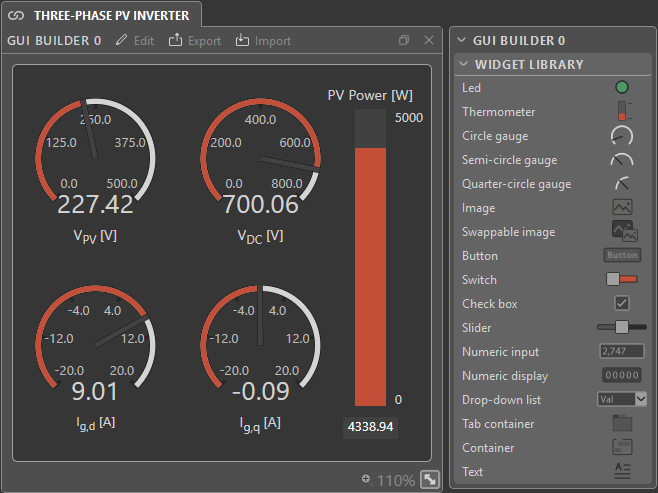
This user guide explains how to use the GUI Builder module of imperix Cockpit to interact with imperix power converter controllers, namely the B-Box 4,…
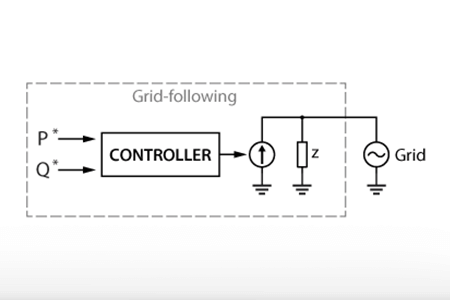
This technical note introduces the working principle of a Grid-Following Inverter (GFLI) and presents an implementation example built with the TPI 8032 programmable inverter. What is…
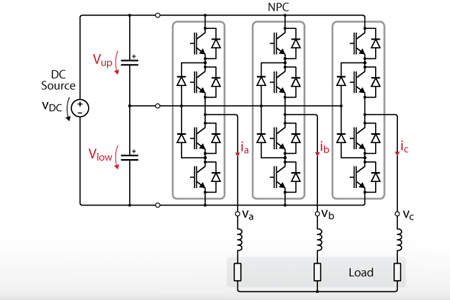
Simple first-step guide to building NPC converters, taking as an example a 3-phase 3-level NPC converter supplied by a DC voltage and connected to a resistive load.
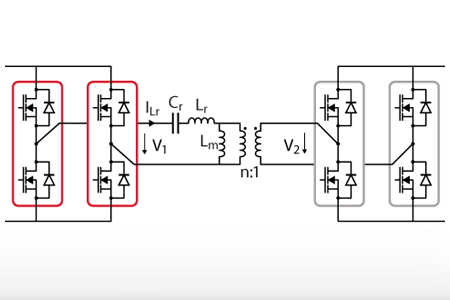
This technical note provides an introduction to the LLC converter, which is an isolated DC-DC converter, popular in a multitude of fields.
The fundamental harmonic approximation is presented as a modeling technique before the operation of the LLC converter is discussed above resonance, at resonance, and below resonance.
Following that, this technical note demonstrates how to build and operate an LLC converter using imperix hardware and software, and compares the physical implementation with the theory and the simulated plant.
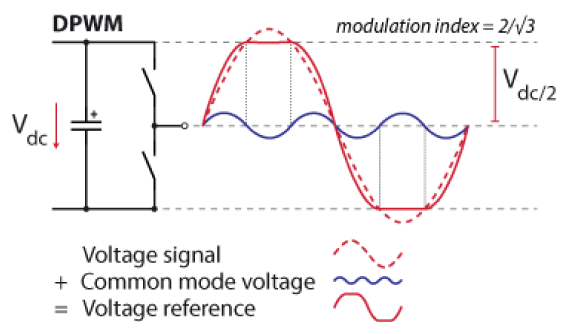
Unlike continuous PWM, where the pulse width is modulated throughout the entire switching cycle, Discontinuous PWM introduces breaks or gaps in the modulation process. These…
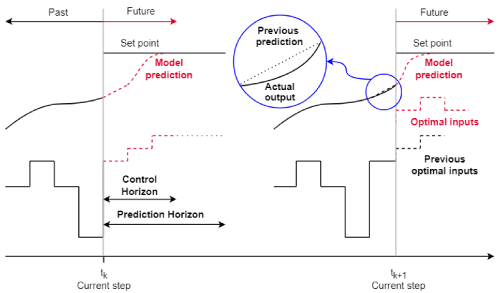
This article aims to explore the Model Predictive Control (MPC) methodology in-depth, focusing on its operational principles, classification, and comparative analysis with conventional PID-based control….

The ACG SDK blocksets for Simulink and PLECS contain blocks specific to the all-in-one programmable inverter (TPI8032 22kW). These wrappers simplify the use of usual blocks,…
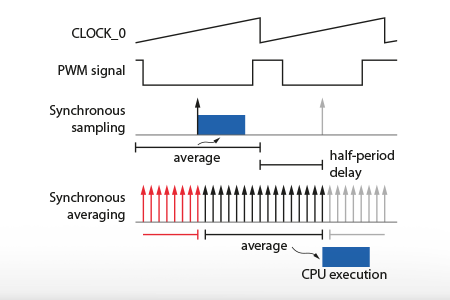
Synchronous averaging is a measurement processing method that computes the average value of an analog signal over one full switching period. In contrast, synchronous sampling…
The TPI SV-PWM helper block is a wrapper that simplifies the use of the SV-PWM block with the all-in-one programmable inverter (TPI8032 22kW). Since the…
End of content
End of content