Motor Testbench quick start guide
This page explains how to get started with the motor drive bundle and the motor testbench. It provides a comprehensive overview of the hardware configuration…
This page explains how to get started with the motor drive bundle and the motor testbench. It provides a comprehensive overview of the hardware configuration…

This document provides guidance to first-time users regarding the essential procedures for deploying code to imperix controllers, as well as connecting with the equipment. It…

The DQ-type PLL is a basic Phase-Locked Loop (PLL) used to extract the phase information of three-phase voltages. It operates by minimizing the voltage projected…
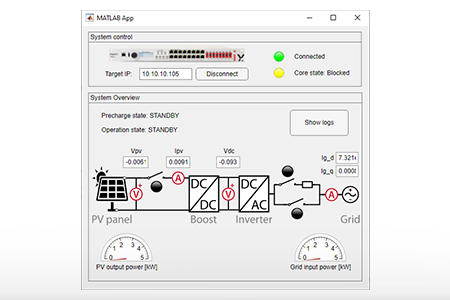
This note outlines the key considerations for developing a custom user interface specifically for the operation of Imperix power converters. Several possibilities are available to…
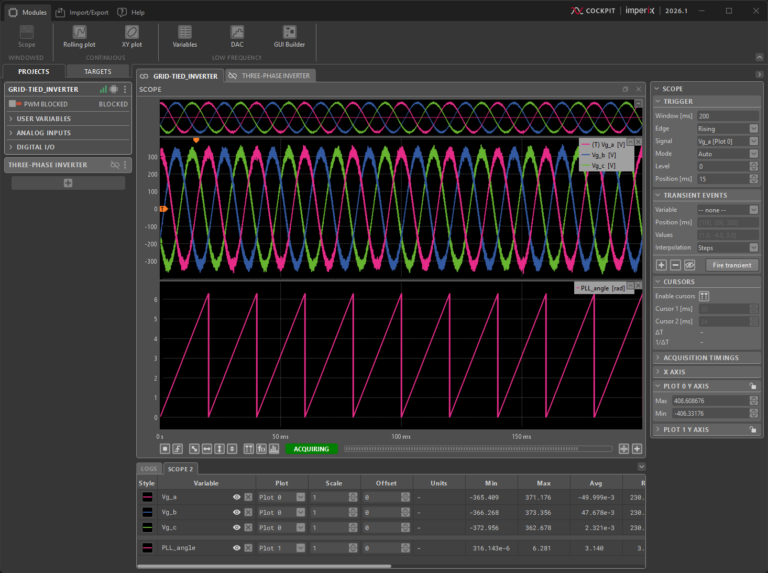
This user guide explains how to use imperix Cockpit to interact with imperix power converter controllers, namely the B-Box 4, B-Box RCP, B-Board PRO, the B-Box…
The User fault block is used to stop the converter operation from the user model. It makes the controller enters the FAULT state (user fault)…
This block writes a user-defined message in the log module of Cockpit. Numerical values can be inserted into the message using the conversion specifier “%f“,…
The Industrial Communication Toolbox Add-On for MATLAB and Simulink (formerly OPC Toolbox) allows communicating with an OPC UA server directly from MATLAB. This page explains…
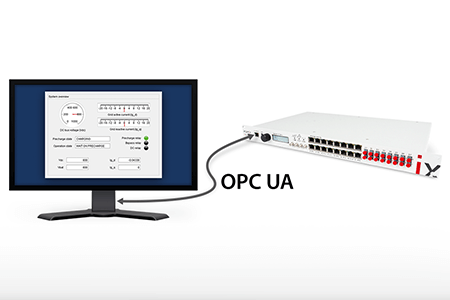
Imperix relies on the increasingly popular OPC UA industrial protocol to interact with programmable controllers remotely. To do so, imperix controllers (or the TPI8032) embed…
The FPGA-based PP-PWM (programmed pulse pattern) peripheral provides a specialized PWM scheme for two and three-level inverters, which relies on pre-computed pulse patterns. This type…
End of content
End of content