XY Plot Module
This article describes how to use the XY plot module of imperix Cockpit to interact with the user code running on imperix controllers, namely the…
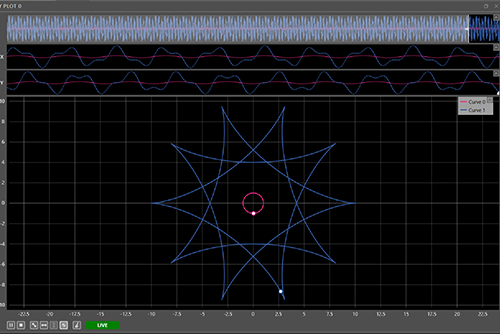
This article describes how to use the XY plot module of imperix Cockpit to interact with the user code running on imperix controllers, namely the…

The EnDat block instantiates an EnDat master to communicate with compatible digital encoders and similar digital sensors, typically in motor drive applications. This block is…
The BiSS-C block instantiates a Bidirectional Synchronous Serial – Communication (BiSS-C) master to communicate with BiSS-C-compatible digital encoders and similar digital sensors, typically in motor…
The SSI block instantiates a Synchronous Serial Interface (SSI) master to communicate with SSI-compatible digital encoders and similar digital sensors, typically in motor drive applications….
All imperix products subject to user programming from the ACG SDK or the CPP SDK require a software license. This concerns the B-Box controllers family…

This B-Box 4 guide provides the necessary information to get started with imperix’s flagship controller. To this end, readers are guided through the implementation of…
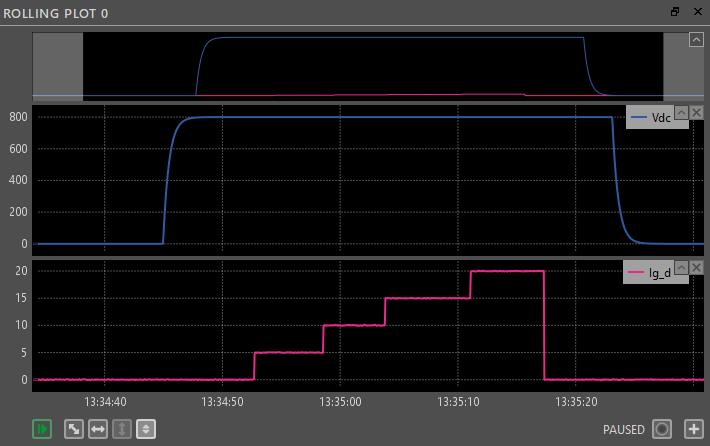
This article describes how to use the Rolling plot module of imperix Cockpit to interact with the user code running on imperix power converter controllers, namely the B-Box…
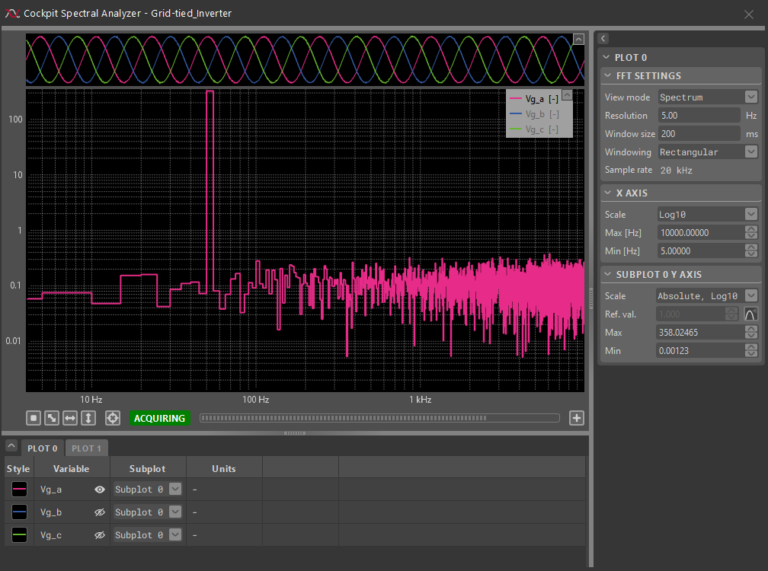
This article describes how to use the Spectral Analyzer of imperix Cockpit to interact with the user code running on imperix power converter controllers, namely the B-Box 4,…
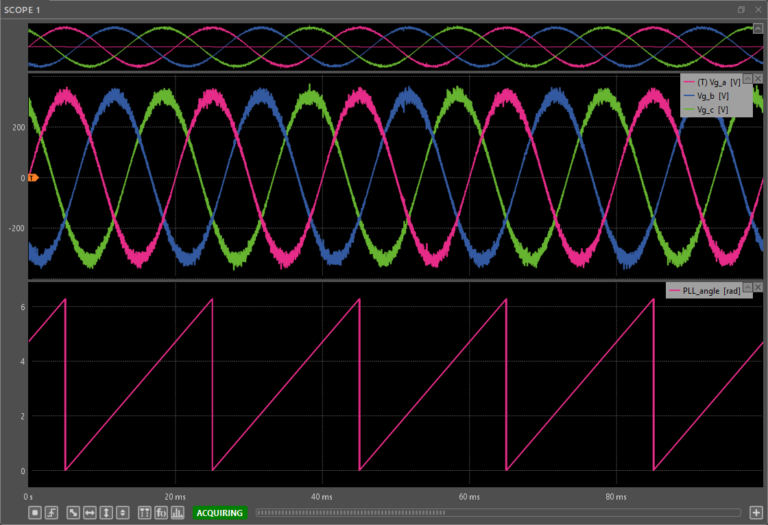
This article describes how to use the Scope module of imperix Cockpit to interact with the user code running on imperix power converter controllers, namely the B-Box 4,…
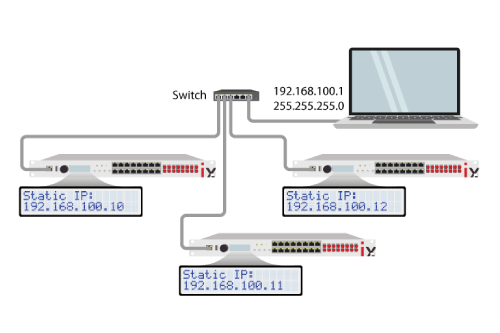
In most cases, connecting to the target using its dynamic IP address is straightforward and requires no additional setup. This dynamic IP is typically either…
End of content
End of content