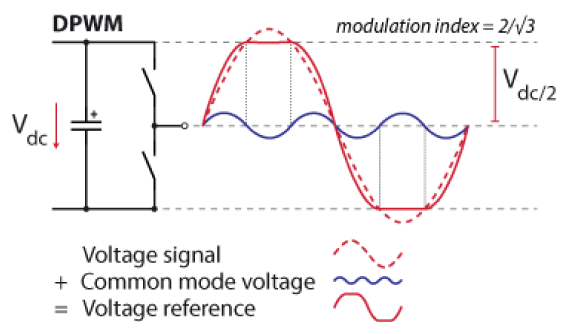
Discontinuous PWM (DPWM)
Unlike continuous PWM, where the pulse width is modulated throughout the entire switching cycle, Discontinuous PWM introduces breaks or gaps in the modulation process. These…
Unlike continuous PWM, where the pulse width is modulated throughout the entire switching cycle, Discontinuous PWM introduces breaks or gaps in the modulation process. These…
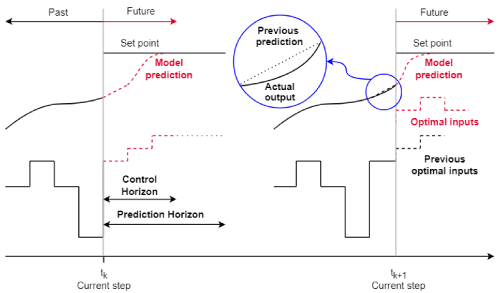
This article aims to explore the Model Predictive Control (MPC) methodology in-depth, focusing on its operational principles, classification, and comparative analysis with conventional PID-based control….
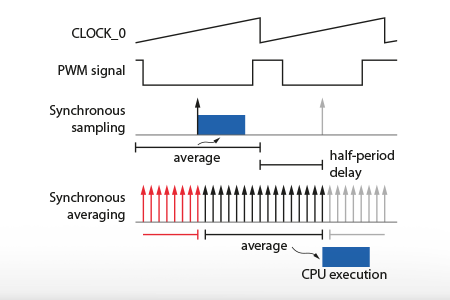
Synchronous averaging is a measurement processing method that computes the average value of an analog signal over one full switching period. In contrast, synchronous sampling…
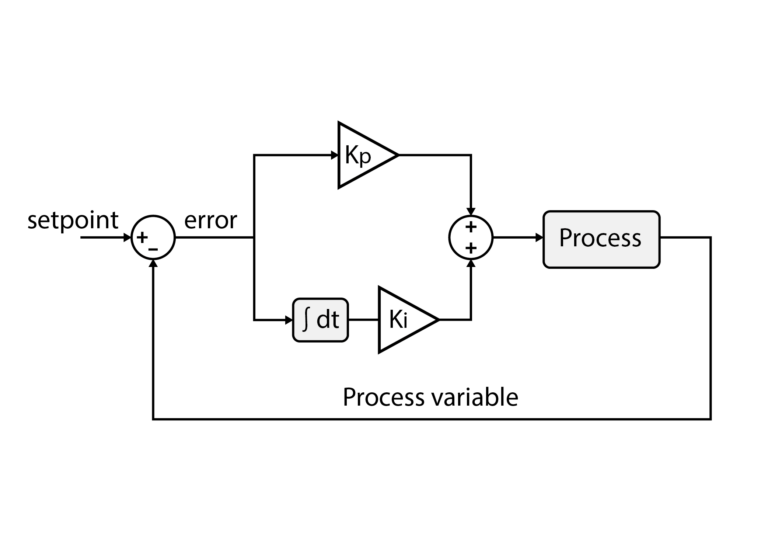
This technical note addresses possible implementations for a discrete PI controller and provides general insight into PI tuning strategies. It also includes practical implementations for…
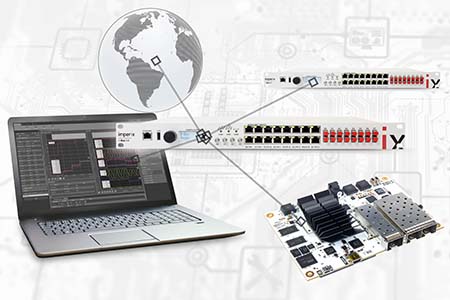
Imperix converter controllers (e.g., B-Box family, B-Board PRO, and TPI) utilize various real-time communication protocols to enable coordination and interaction with external devices. In this…

This document provides guidance to first-time users regarding the essential procedures for deploying code to imperix controllers, as well as connecting with the equipment. It…

The DQ-type PLL is a basic Phase-Locked Loop (PLL) used to extract the phase information of three-phase voltages. It operates by minimizing the voltage projected…
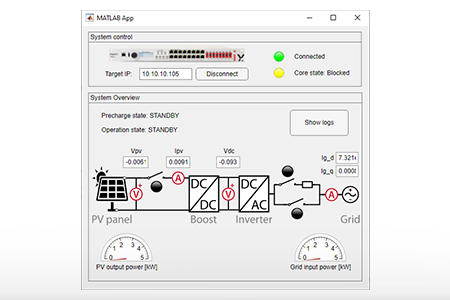
This note outlines the key considerations for developing a custom user interface specifically for the operation of Imperix power converters. Several possibilities are available to…
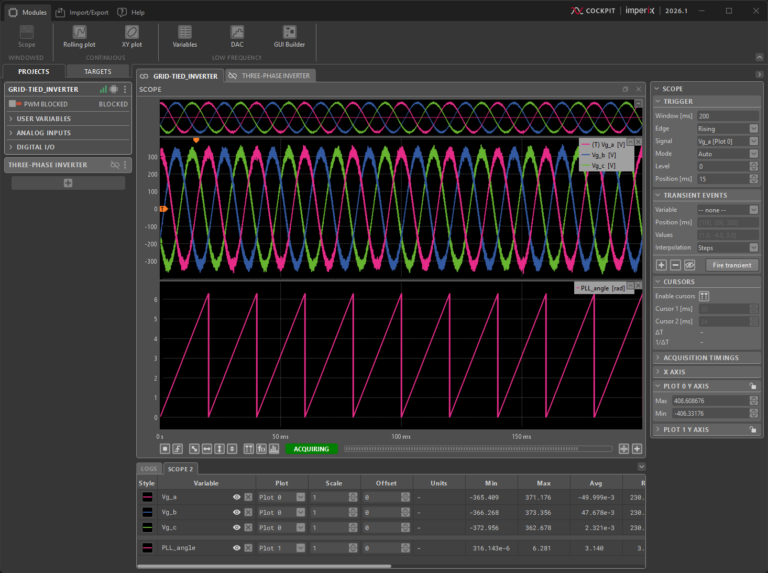
This user guide explains how to use imperix Cockpit to interact with imperix power converter controllers, namely the B-Box 4, B-Box RCP, B-Board PRO, the B-Box…
The User fault block is used to stop the converter operation from the user model. It makes the controller enters the FAULT state (user fault)…
End of content
End of content