TPI CB-PWM – Helper block
The TPI CB-PWM helper block is a wrapper that simplifies the use of the CB-PWM block with the all-in-one programmable inverter (TPI8032 22kW). Since the…

The TPI CB-PWM helper block is a wrapper that simplifies the use of the CB-PWM block with the all-in-one programmable inverter (TPI8032 22kW). Since the…
The TPI RLY block controls the relays of the AC precharge circuit of the all-in-one programmable inverter (TPI8032 22kW). For reference, the topology of the…
The TPI GPO helper block is a wrapper that simplifies the use of the GPO block with the all-in-one programmable inverter (TPI8032 22kW). Simulink GPO…
The TPI GPI helper block is a wrapper that simplifies the use of the GPI block with the all-in-one programmable inverter (TPI8032 22kW). Simulink GPI…
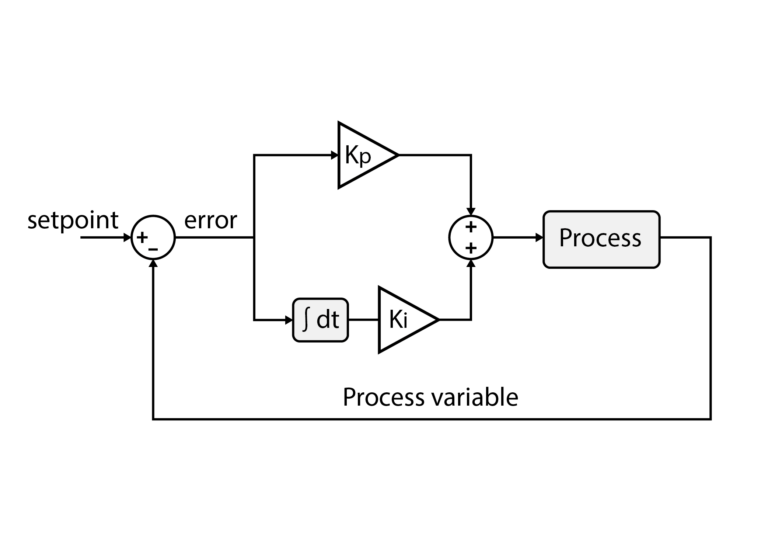
This technical note addresses possible implementations for a discrete PI controller and provides general insight into PI tuning strategies. It also includes practical implementations for…
Imperix converter controllers (e.g., B-Box family, B-Board PRO, and TPI) utilize various real-time communication protocols to enable coordination and interaction with external devices. In this…

This document provides guidance to first-time users regarding the essential procedures for deploying code to imperix controllers, as well as connecting with the equipment. It…
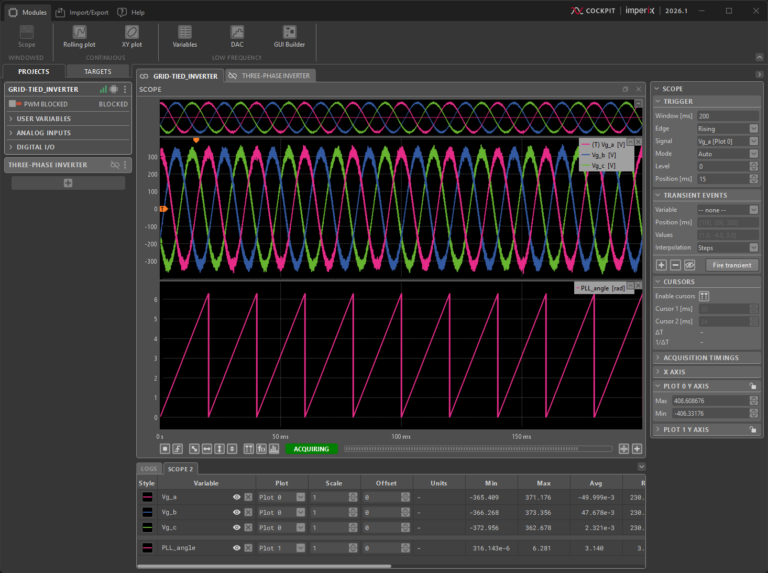
The DQ-type PLL is a basic Phase-Locked Loop (PLL) used to extract the phase information of three-phase voltages. It operates by minimizing the voltage projected…
This user guide explains how to use imperix Cockpit to interact with imperix power converter controllers, namely the B-Box 4, B-Box RCP, B-Board PRO, the B-Box…
The User fault block is used to stop the converter operation from the user model. It makes the controller enters the FAULT state (user fault)…
End of content
End of content