FPGA-based hysteresis current controller for three-phase inverter
This technical note provides an example of how a fast hysteresis current controller can be implemented, leveraging the possibility of editing the FPGA firmware for…
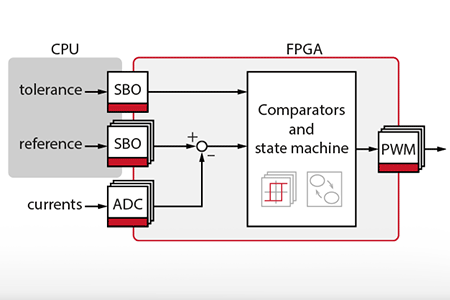
This technical note provides an example of how a fast hysteresis current controller can be implemented, leveraging the possibility of editing the FPGA firmware for…
This technical note presents various techniques for the DC bus balancing of NPC converters. These techniques are notably used in TN135, which implements a grid-tied…
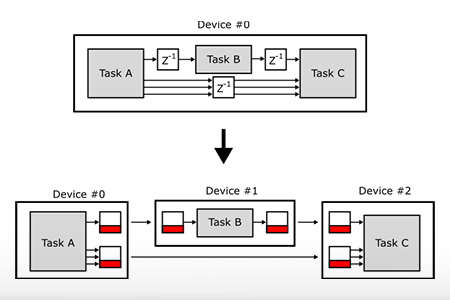
This note focuses on the multi-master feature which allows executing control codes on multiple imperix power converter controllers interconnected using optical fiber (SFP). The imperix in-house…
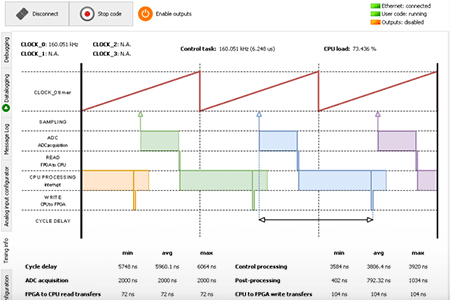
The BB Control Timing info tab provides a graphical representation of the various computation and communication delays involved in the B-Board PRO and B-Box RCP…
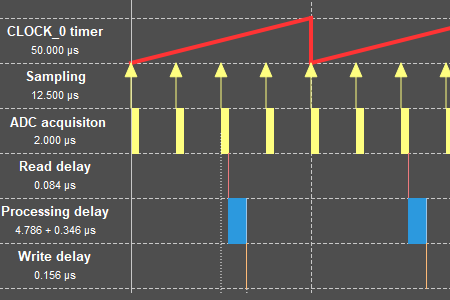
In a standard configuration, the control algorithm executes immediately following each sampling event. The SCLK multiplier modifies this behavior by allowing multiple sampling events to…
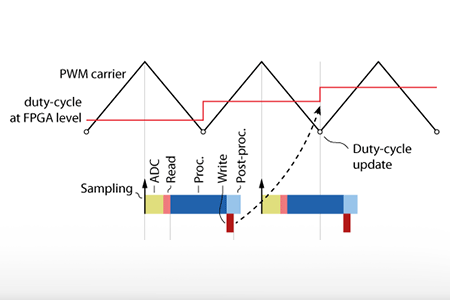
This product note explains how to compute the discrete control delay of a control algorithm running on an imperix controller. Context The execution of a…
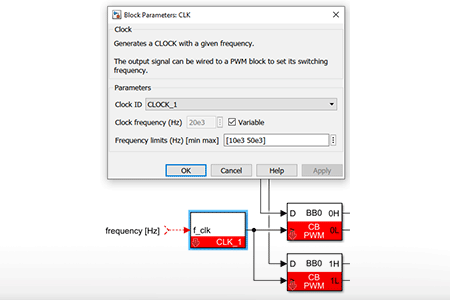
This note covers the configuration and implementation of variable frequency operation with imperix controllers (B-Box RCP and B-BoardPRO). Changing the modulation frequency during the control…
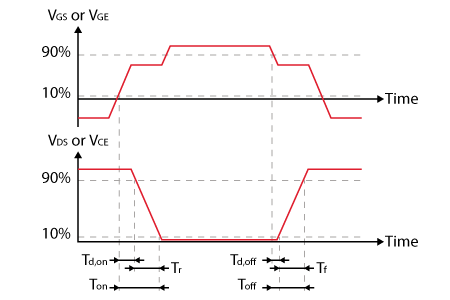
Dead time is a brief non-conduction interval imposed across two complementary PWM signals to prevent a potentially damaging shoot-through inside the corresponding switching cell. Dead…
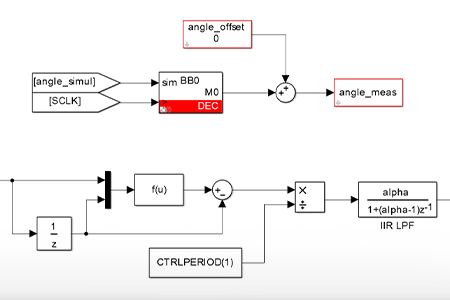
This document provides instructions on how to interface an incremental encoder with a B-Box RCP or a B-Board PRO and how to read the motor…
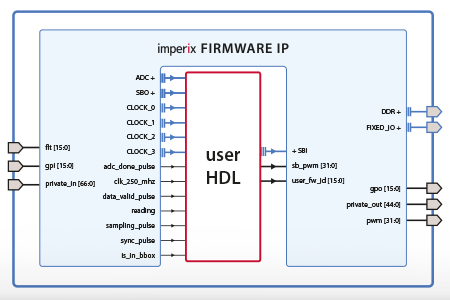
This page documents the imperix firmware IP for AMD Xilinx Vivado, which is mandatory for programming the FPGA of imperix controllers. The IP encapsulates the…
End of content
End of content