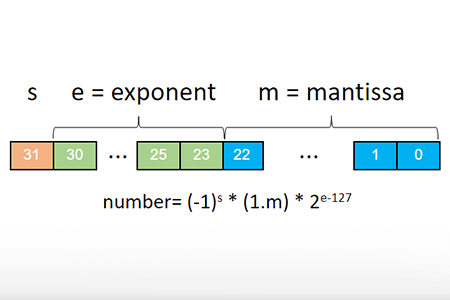
Fixed point vs floating point arithmetic in FPGA
The choice of fixed vs floating-point arithmetic for an FPGA algorithm is a decision that has a significant impact on the FPGA resources usage, computation…
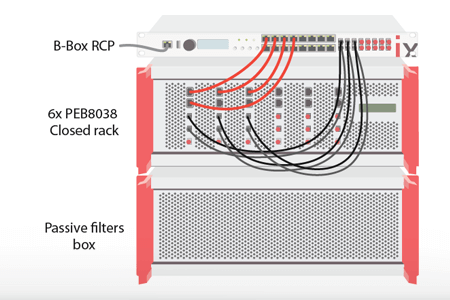
The B-Box 4 is a fully programmable controller, specifically tailored for the control of power electronics converters.
Thanks to its fast programming and its embedded protections, it is ideally suited to the experimental validation of converter control algorithms in laboratory environments.
The choice of fixed vs floating-point arithmetic for an FPGA algorithm is a decision that has a significant impact on the FPGA resources usage, computation…
This page provides step-by-step guidance to install Xilinx Vivado Design Suite, the tools used to program the FPGA of imperix controllers.
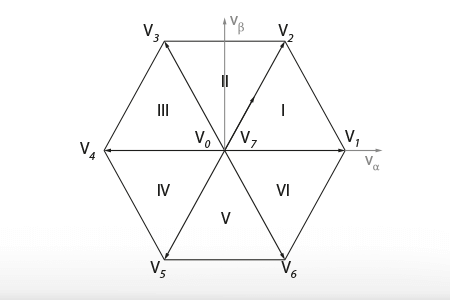
What is the space vector modulation (SVM) technique and how does it work? To answer these questions, this article introduces first the notions of active…
This page is a quick-start guide to build a 3 phase inverter using imperix equipment. It is specifically made to accompany users who want to…

The SFP output mailbox block allows sending data float (single) signals via the SFP optic cables. To recieve data float (single), the SFP input mailbox…
The SFP input mailbox block allows receiving float (single) signals via the SFP optic cables. To send data float (single), the SFP output mailbox block…
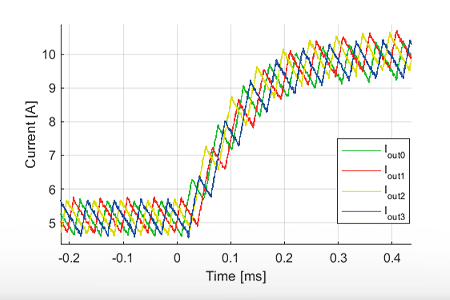
Introduction This technical note presents the implementation of an interleaved buck converter (multiphase step-down converter) and details an appropriate sampling method of the different currents…
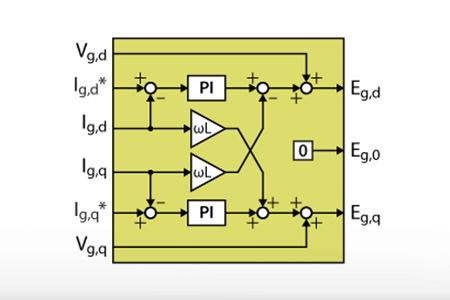
Control algorithms for power electronics converters often rely on PI controllers executed on the CPU of the controller. That’s the technique used in most of…
The “dq0 to Alpha-Beta-Zero” converts a space vector from a rotating (dq0) to a stationary (αβ0) reference frame. The angle of the rotating reference frame…
The “Alpha-Beta-Zero to dq0” block converts a space vector from a stationary (αβ0) to a rotating reference frame (dq0). The angle of the rotating reference…
End of content
End of content