GCP – Grid connection panel
The GCP block is a simulation model included in the Imperix Power library. It models the imperix grid connection panel in Simulink and PLECS simulation. For…

The GCP block is a simulation model included in the Imperix Power library. It models the imperix grid connection panel in Simulink and PLECS simulation. For…
The PEN block is a simulation model included in the Imperix Power library. It models the imperix NPC phase-leg PEN8018 in Simulink and PLECS simulation….
The PEH block is a simulation model included in the Imperix Power library. It models the imperix full-bridge module PEH4010 and PEH2015 in Simulink and…
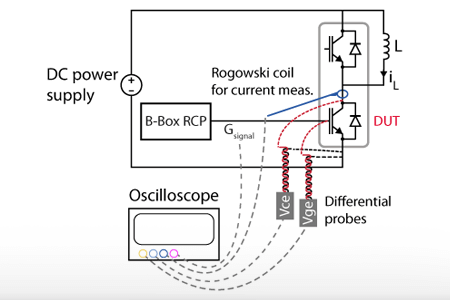
Double pulse testing is a widely utilized method to evaluate the switching behavior of power semiconductor devices, such as MOSFETs and IGBTs, as well as…
The angle generator block contains a counter that continuously outputs the current value of the angle, wrapped between the chosen lower and upper limits, with…
The PEB block is a simulation model included in the Imperix Power library. It models the imperix half-bridge module PEB-800-40, PEB8038, PEB8024, and PEB4050 in…
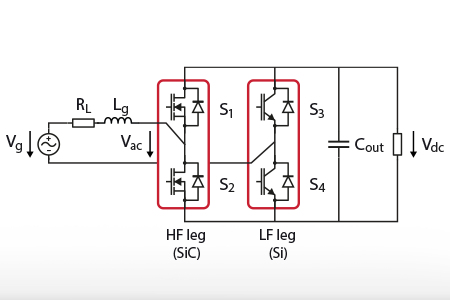
This article introduces the concept of power factor correction (PFC) using a single-phase totem-pole PFC rectifier as an example. The theory presented is then validated…
This document is primarily intended for electronic board designers wishing to integrate the B-Board PRO into their designs. It essentially serves as documentation for the Eval-Board marketed…
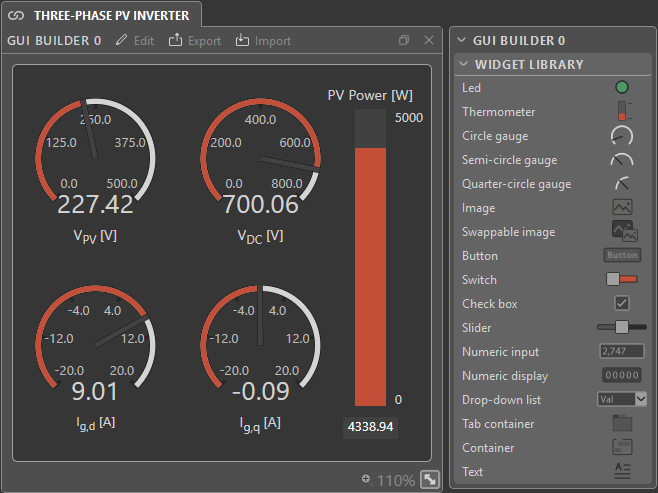
This user guide explains how to use the GUI Builder module of imperix Cockpit to interact with imperix power converter controllers, namely the B-Box 4,…
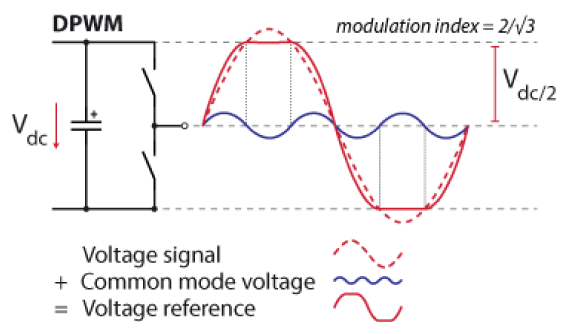
Unlike continuous PWM, where the pulse width is modulated throughout the entire switching cycle, Discontinuous PWM introduces breaks or gaps in the modulation process. These…
End of content
End of content