Scope Module
This article describes how to use the Scope module of imperix Cockpit to interact with the user code running on imperix power converter controllers, namely the B-Box 4,…
This article describes how to use the Scope module of imperix Cockpit to interact with the user code running on imperix power converter controllers, namely the B-Box 4,…
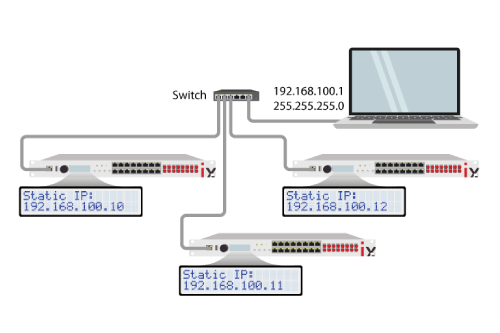
In most cases, connecting to the target using its dynamic IP address is straightforward and requires no additional setup. This dynamic IP is typically either…
As introduced in PN118, SFP communication constitutes a convenient way to interconnect devices. Widely used, it offers an efficient layer on which protocols such as…
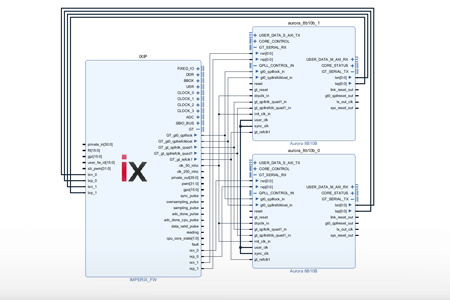
The SFP ports on imperix controllers are typically used for interconnecting devices in a RealSync network. However, when customizing the FPGA firmware, imperix designed the…
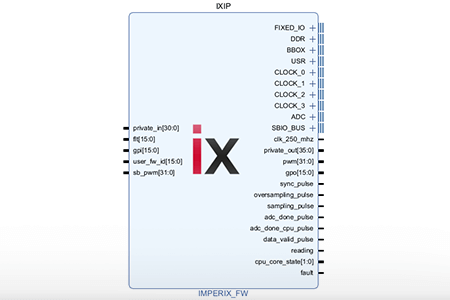
This page provides the imperix sources files required to start programming the FPGA on imperix controllers. The provided archive contains the imperix firmware IP and…
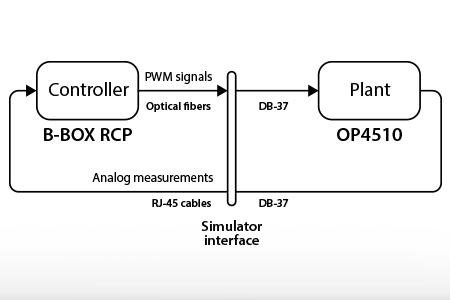
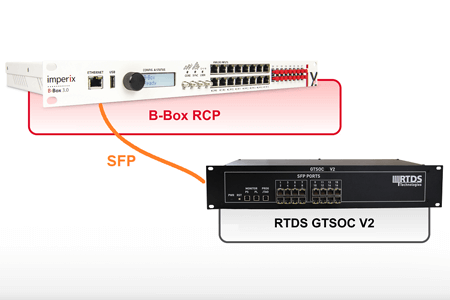
This page presents a first HIL example to get started with a B-Box RCP and an OPAL-RT OP4510. Although validated with an OP4510, the provided…
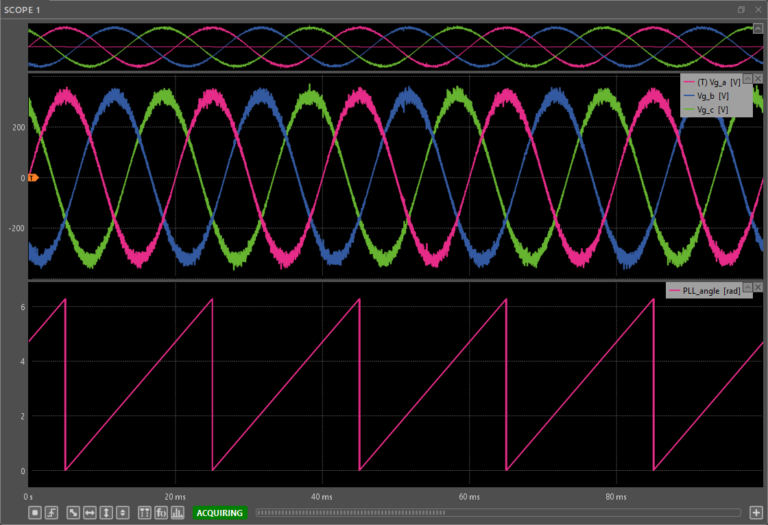
This technical note presents a selection of the most prevalent grid synchronization methodologies employed in grid-tied power converters. These methods are crucial for enabling power…

The CSR block is a simulation model included in the Imperix Power library. It implements the model of the imperix current sensor CSR-25-HBW and DIN50A in…
The VSR block is a simulation model included in the Imperix Power library. It implements the model of the imperix voltage sensor VSR-1000-ISO, VSR-500-HBW, and DIN800…
The PFB block is a simulation model included in the Imperix Power library. It models one symmetrical half of the imperix passive filters box in Simulink…
End of content
End of content