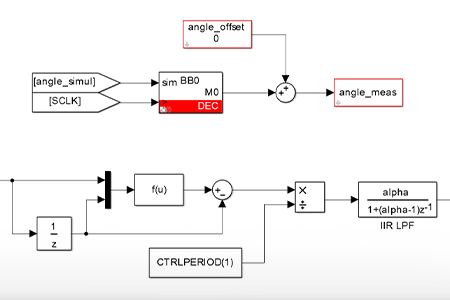
Discrete control delay identification
This product note explains how to compute the discrete control delay of a control algorithm running on an imperix controller. Context The execution of a…
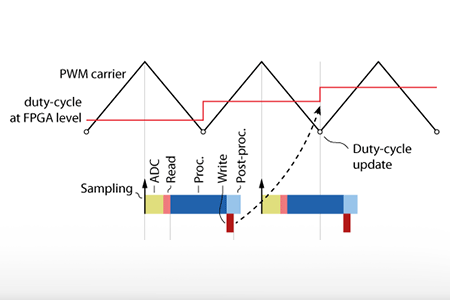
This product note explains how to compute the discrete control delay of a control algorithm running on an imperix controller. Context The execution of a…
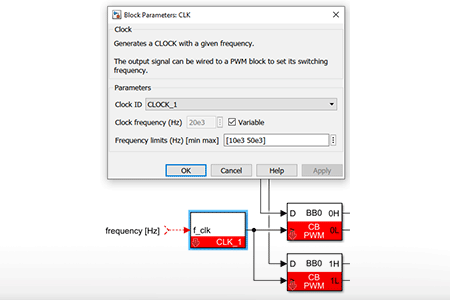
This note covers the configuration and implementation of variable frequency operation with imperix controllers (B-Box RCP and B-BoardPRO). Changing the modulation frequency during the control…
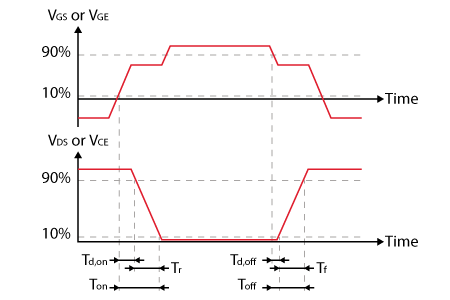
Dead time is a brief non-conduction interval imposed across two complementary PWM signals to prevent a potentially damaging shoot-through inside the corresponding switching cell. Dead…
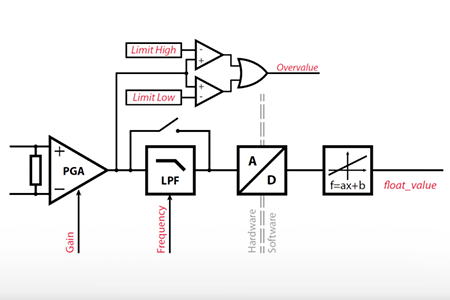
The B-Box RCP 3possesses 16 analog inputs with strictly identical channels. The equivalent schematic of the complete data acquisition chain is depicted below. Each channel…
This document provides instructions on how to interface an incremental encoder with a B-Box RCP or a B-Board PRO and how to read the motor…
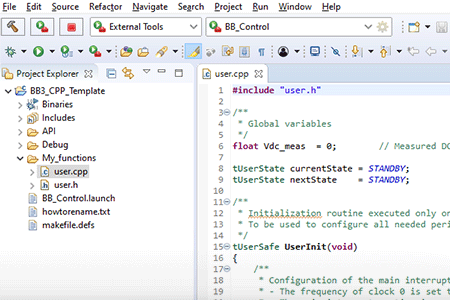
This note describes how to install and get started with the imperix C++ Software Development Kit (SDK). Software installation After registration, the installer of the…
This document provides instructions on how to implement Multi-rate control on PLECS with ACG SDK. It allows running part of the control at a slower…
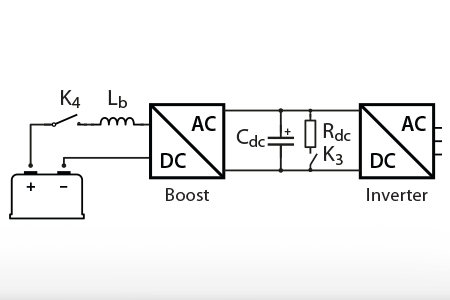
In voltage source converters, pre-charging the inverter DC bus is required before connecting it to external voltage sources, so that to avoid inrush currents that may be destructive.
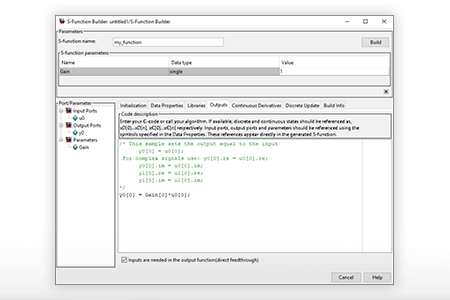
This note provides instructions for integrating C code into a control algorithm developed using the ACG SDK via S-Functions, which is probably the best way…
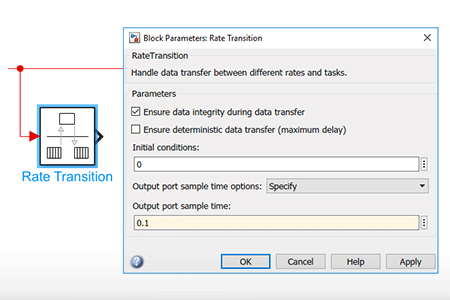
This document provides instructions on how to implement Multi-rate control on Simulink with ACG SDK. It allows running part of the control at a slower…
End of content
End of content