PEB – Half-bridge module
The PEB block is a simulation model included in the Imperix Power library. It models the imperix half-bridge module PEB-800-40, PEB8038, PEB8024, and PEB4050 in…
The B-Box 4 is a fully programmable controller, specifically tailored for the control of power electronics converters.
Thanks to its fast programming and its embedded protections, it is ideally suited to the experimental validation of converter control algorithms in laboratory environments.

The PEB block is a simulation model included in the Imperix Power library. It models the imperix half-bridge module PEB-800-40, PEB8038, PEB8024, and PEB4050 in…
The imperix Power library is a blockset contained within the imperix ACG SDK, which contains accurate models of imperix power products. This article summarizes the…

This page introduces the implementation of a solid-state transformer with cascaded H-bridge, dual active bridge, and grid-forming inverter.
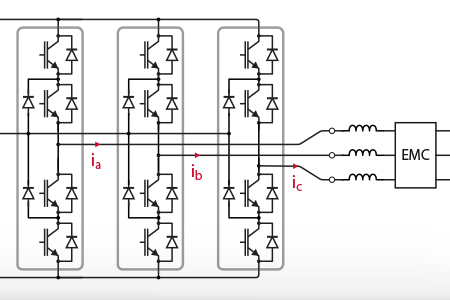
This article introduces an example of Finite Control Set Model Predictive Control (FCS-MPC) for an LCL-filtered voltage-controlled inverter. The proposed control implementation is derived from…
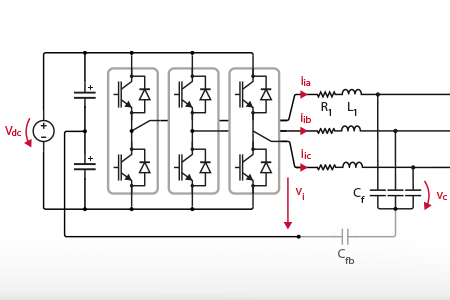
Closed-loop current control for a grid-tied Neutral Point Clamped (NPC) inverter. The considered setup is a three-phase three-wire NPC inverter supplied by a DC source and connected to the grid.
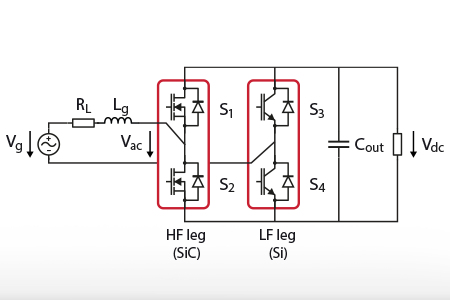
This article introduces the concept of power factor correction (PFC) using a single-phase totem-pole PFC rectifier as an example. The theory presented is then validated…
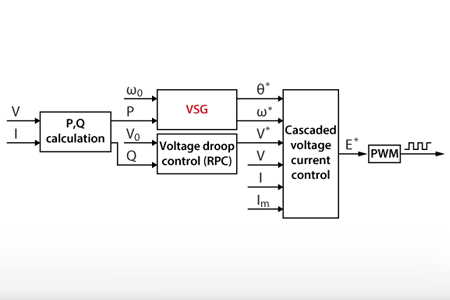
This article explains why the lack of inertia in grid-forming inverters can impact the grid and how to alleviate the issue with a virtual synchronous…

What is an onboard battery charger? An onboard battery charger (OBC) is an automotive power electronic converter tailored to charge an EV directly from the…
This technical note provides a short overview of the key factors that are essential when designing a resonant tank circuit for an LLC converter. By…
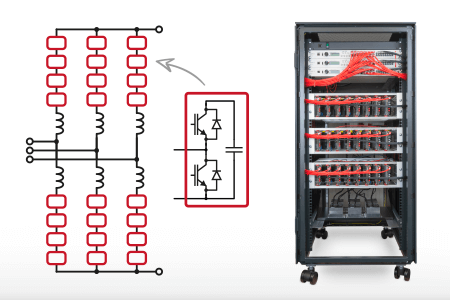
This article gives step-by-step instructions on how to operate the modular multilevel converter (MMC) bundle with a simple control algorithm.
End of content
End of content