LLC resonant converter for battery charging applications
Thanks to its flexible output voltage range, the LLC resonant converter is a popular choice of topology for battery charger applications, such as onboard chargers…
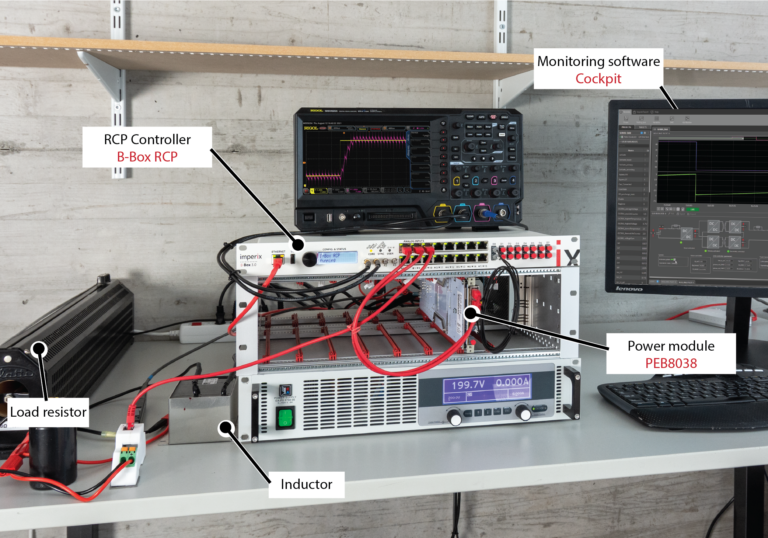
The B-Box 4 is a fully programmable controller, specifically tailored for the control of power electronics converters.
Thanks to its fast programming and its embedded protections, it is ideally suited to the experimental validation of converter control algorithms in laboratory environments.
Thanks to its flexible output voltage range, the LLC resonant converter is a popular choice of topology for battery charger applications, such as onboard chargers…
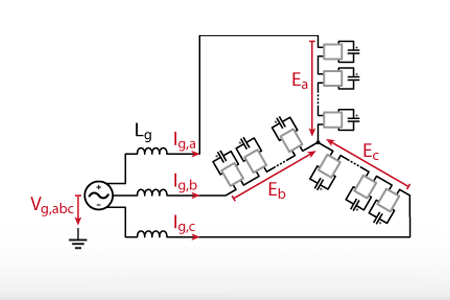
This article focuses on the control of a star-connected cascaded H-bridge (CHB) using voltage balancing controllers superimposed on a state-of-the-art cascaded voltage regulator with an inner current control loop.
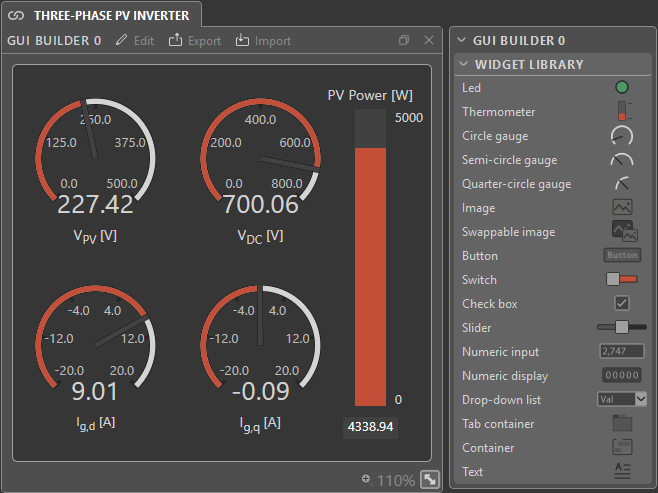
This user guide explains how to use the GUI Builder module of imperix Cockpit to interact with imperix power converter controllers, namely the B-Box 4,…
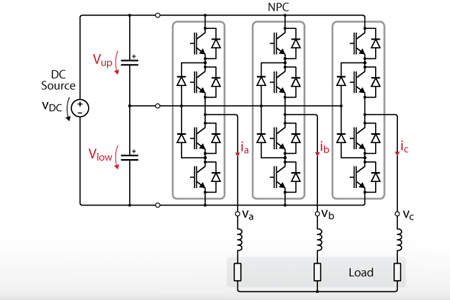
Simple first-step guide to building NPC converters, taking as an example a 3-phase 3-level NPC converter supplied by a DC voltage and connected to a resistive load.
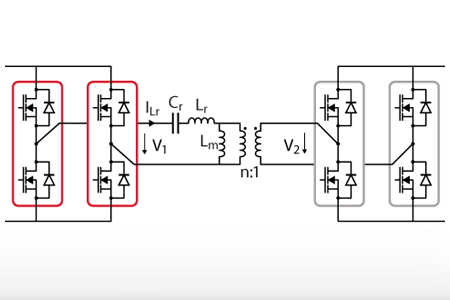
This technical note provides an introduction to the LLC converter, which is an isolated DC-DC converter, popular in a multitude of fields.
The fundamental harmonic approximation is presented as a modeling technique before the operation of the LLC converter is discussed above resonance, at resonance, and below resonance.
Following that, this technical note demonstrates how to build and operate an LLC converter using imperix hardware and software, and compares the physical implementation with the theory and the simulated plant.
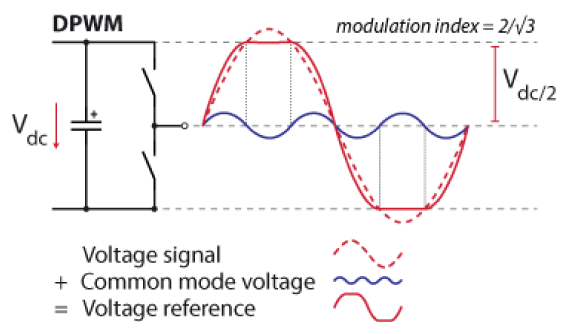
Unlike continuous PWM, where the pulse width is modulated throughout the entire switching cycle, Discontinuous PWM introduces breaks or gaps in the modulation process. These…
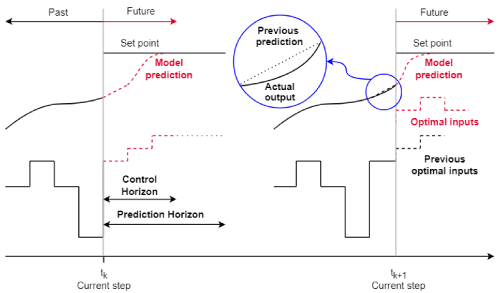
This article aims to explore the Model Predictive Control (MPC) methodology in-depth, focusing on its operational principles, classification, and comparative analysis with conventional PID-based control….
This technical note presents a conventional PI controller-based current control strategy, using a buck converter as example. The developed example may be employed as an…
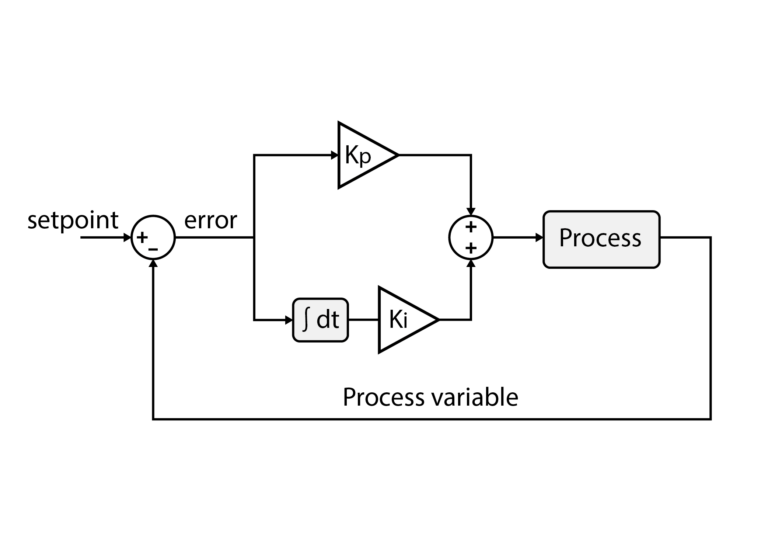
This technical note addresses possible implementations for a discrete PI controller and provides general insight into PI tuning strategies. It also includes practical implementations for…
Imperix converter controllers (e.g., B-Box family, B-Board PRO, and TPI) utilize various real-time communication protocols to enable coordination and interaction with external devices. In this…
End of content
End of content