Table of Contents
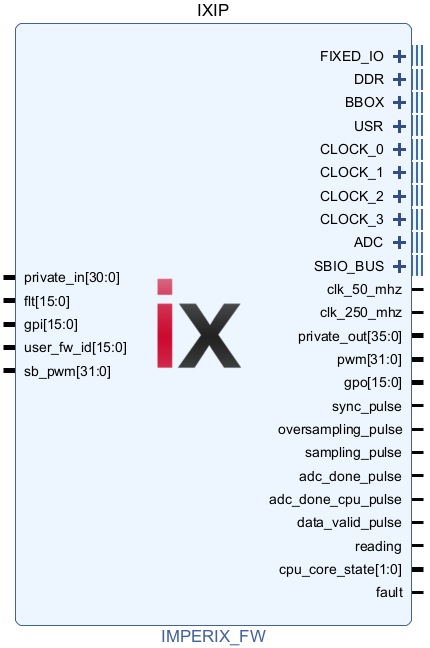
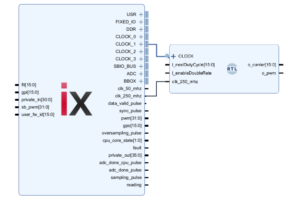
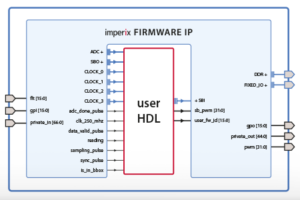
This page documents the imperix firmware IP for AMD Xilinx Vivado, which is mandatory for programming the FPGA of imperix controllers. The IP encapsulates the imperix proprietary FPGA logic and offers various interfaces allowing users to add their own custom logic around it.
This document details the IP signals and associated timings. For guides on using specific features, the product notes linked in the table below may be consulted.
| Interface | Feature | Product note |
| ADC | Retrieving ADC conversion results as soon as they are available. | PN126 |
| SBIO | Exchanging data between the user code running in the CPU and the FPGA. | PN128 |
| SB-PWM | Driving the PWM output chain, comprised of a dead-time generation system and the hardware protection mechanisms. | PN127 |
| USR | Accessing physical 3V3 I/O pins. | PN179 |
| GT | Accessing Gigabit Transceivers (GT), enabling support of protocols such as Aurora on SFP ports. | PN118 |
| BSCAN | U sing ILAs to observe FPGA signals in real-time for debugging purposes. | PN129 |
Architecture overview
Because FPGA development operates at the hardware level, a proper understanding of the underlying system architecture and real-time execution behavior is essential to successfully integrating custom logic in an imperix controller FPGA.
Imperix is currently supporting two generations of controller, both based on AMD Xilinx System-on-Chips (SoCs):
- Gen 3 controllers (B-Box RCP3.0, B-Box Micro, B-Board PRO, TPI8032) are based on a AMD Xilinx Zynq 7000
- Gen 4 controller (B-Box 4) is based of an AMD Xilinx Zynq Ultrascale+
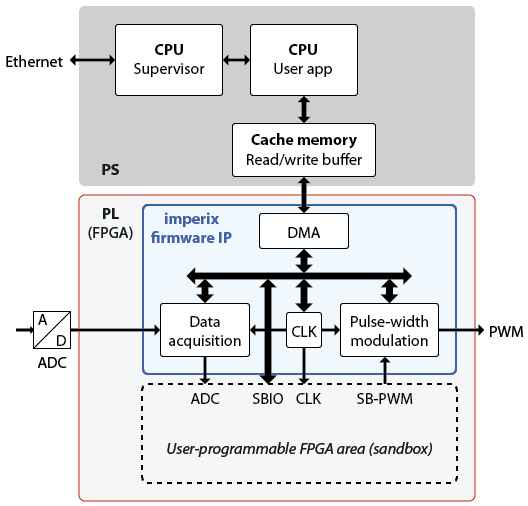
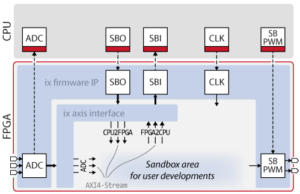
The image above depicts the overall architecture of imperix controllers. The key components are:
- The supervisor CPU runs on Linux. It is responsible for loading the application code, supervising system execution and managing data logging.
- The user app CPU runs on BBOS. It executes the application-level control code developed by the user using the ACG SDK (Simulink or PLECS ) or the CPP SDK (C/C++).
- The imperix firmware IP encapsulates the mandatory pre-implemented FPGA peripherals.
The core modules contained within the imperix firmware IP are:
- The data acquisition module (documented in PN126) pilots the ADC chips and makes the analog input measurement available to both the CPU user app and the user-programmable FPGA area.
- The pulse-width modulation (documented in PN127) contains the pre-implemented PWM modulators (CB, SV, DO, SS, PP) and allows driving the PWM outputs from a custom modulator through the SB-PWM input.
- The CLK module manages the main clock CLK0 (configured via the CONFIG block), and the optional CLK1, CLK2 and CLK3 (configured via CLK block).
- The DMA is in charge of transferring the data between the FPGA and the CPU read/write buffers. The read and write phases are detailed in the next section.
Execution timing & signals
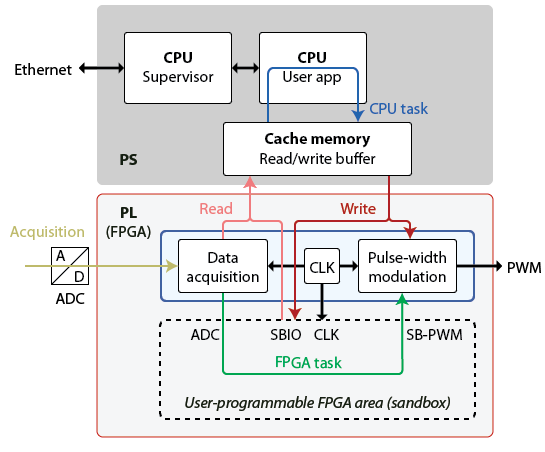
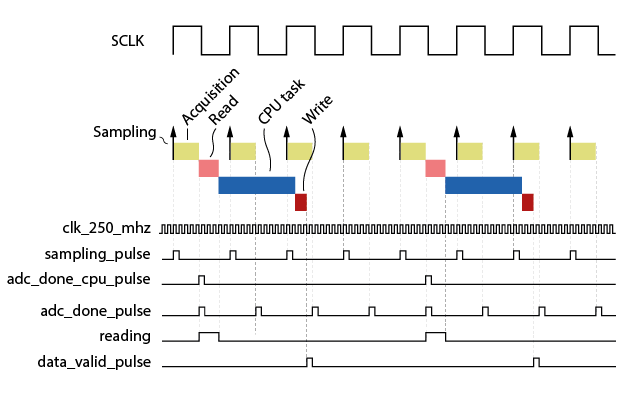
The following figure illustrates the phases involved in the CPU control path (acquisition, read, CPU task and write) and the FPGA control path (acquisition and FPGA task).
The execution phases are defined as follow:
- Acquisition: covers the physical Analog-to-Digital conversion (ADC) and the subsequent acquisition of the results to the FPGA fabric.
- Read: data flagged as real-time are transferred from the FPGA to the CPU read buffer.
- CPU task: the CPU reads the buffer and executes the main control task (the user’s application control code). At the conclusion of this phase, the CPU write buffer is updated with new control values.
- Write: data flagged as real-time is transferred from the CPU write buffer back to the FPGA peripherals via DMA.
- FPGA task: control algorithm fully executed in the FPGA, such as the FPGA-based control of a grid-tied inverter presented in the TN147 example.
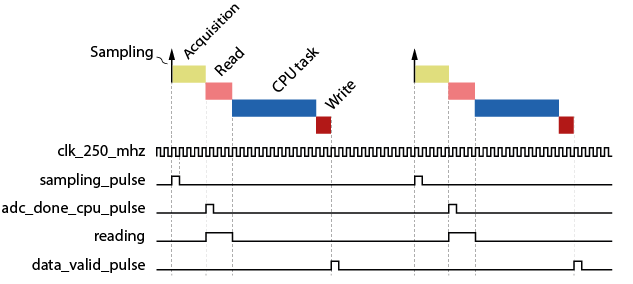
As illustrated in the schematic below, the imperix firmware IP provides several signals designed to monitor and synchronize logic with the execution of these different phases.
| Port name | Clk domain | Description |
|---|---|---|
| clk_250_mhz | Corresponds to the rising edge of the sampling clock SCLK and indicates the ADC sampling instant and the start of the acquisition phase. |
| clk_250_mhz | Indicates that the acquisition phases finished and new ADC values are available at the ADC interface. |
adc_done_cpu_pulse | clk_250_mhz | When the sampling rate differs from the CPU rate, this signal is a decimated version of adc_done_pulse. It is set when the CPU control path stages are scheduled to execute. The following section describes this scenario in more details. |
| clk_250_mhz | Indicates that the system is in the read phase, in which data flagged as real-time (SBI registers, ADC, GPI, etc.) are sent to the CPU read buffer. |
data_valid_pulse | clk_250_mhz | Asserted at the end of the write phase, notifying that new data were written (SBO registers, PWM duty-cycles, GPO, etc.) . |
Handling different execution rates
In many applications, FPGA-based control algorithms execute at a higher rate than the CPU task. In such case, a postscaler can be configured in the CONFIG block to reduce the execution rate of the CPU task relative to the sampling frequency.
When a postscaler is used, the adc_done_cpu_pulse signal acts as the decimated version of adc_done_pulse. It is asserted when the CPU control path stages are scheduled to run.
By default, the ADC block or driver only provides only the most recently sampled value. However, it is still possible to retrieve all ADC samples within the CPU using the ADC history feature, as illustrated below. This feature allows the retrieval of the N most recent samples (up to a maximum of 64).
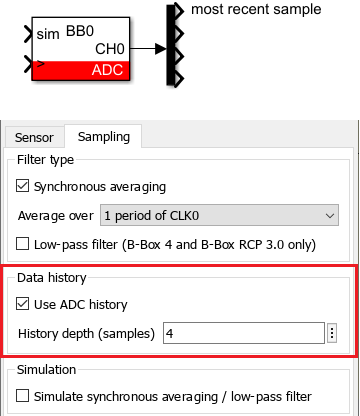
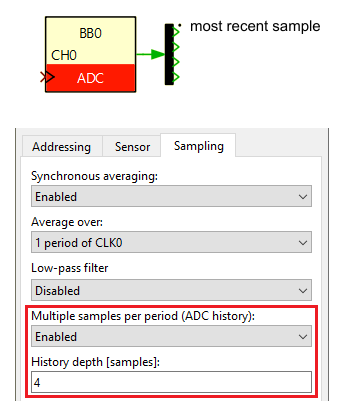
CPP SDK users can implement this using the Adc_ConfigureHistory and Adc_GetHistory functions, as illustrated in the code snippet below:
tUserSafe UserInit(void) {
// Sets CLK0 at 50 kHz
Clock_SetFrequency(CLOCK_0, 50e3);
// Sets a CPU postscaler of 4
ConfigureMainInterrupt(UserInterrupt, CLOCK_0, 0.5, 4)
// Setup a history of 4 samples for ADC0
Adc_ConfigureHistory(ADC0, 4);
// some other code...
return SAFE
}
tUserSafe UserInit(void) {
float s0, s1, s2, s3;
s0 = Adc_GetHistory(ADC0, 0); // most recent sample
s1 = Adc_GetHistory(ADC0, 1);
s2 = Adc_GetHistory(ADC0, 2);
s3 = Adc_GetHistory(ADC0, 3);
return SAFE;
}Code language: C++ (cpp)Differences between Gen 3 and Gen 4 for FPGA development
The Gen 4 introduces several key enhancements, including access to analog measurement in floating point format, faster transceivers, and expanded FPGA resources. The table below summaries the key differences between the two generations.
| Component | Gen 3 | Gen 4 |
| FPGA | Kintex 7 125K | Kintex US+ 504K |
| Logic | LUTs: 78600 Registers: 157200 | LUTs: 230400 Registers: 460800 |
| Logic used by imperix IP* | min: LUTs: 25482 (32.4%) Registers: 46374 (29.5%) max: LUTs: 39143 (49.8%) Registers: 67203 (42.7%) | min: LUTs 70733 (30.7%) Registers 108749 (23.6%) max: LUTs: 94233 (40.9%) Registers: 140636 (30.5%) |
| Usable logic left* | max: LUTs: 53118 (67.6%) Registers: 110826 (70.5%) min: LUTs: 39457 (50.2%) Registers: 89997 (57.3%) | max: LUTs: 159667 (69.3%) Registers: 352051 (76.4%) min: LUTs: 136167 (59.1%) Registers: 320164 (60.5%) |
| Gigabit Transceivers available from the sandbox | 3x GTX (3x SFP connectors) Up to 6.6 Gbps | 4x GTH (1x QSFP connector) Up to 16.3 Gbps |
| Bidirectional direct FPGA I/Os (USR) | 36x | 36x |
| PWM outputs | 32x | 48x |
| ADC interface | 16x (int16) | 24x (int16, or float) |
| RS485/RS422 | – | 2x |
| Acquisition delay | 2 μs (B-Box RCP 3.0) 500 ns (B-Box Micro, B-Board, TPI8032) | 200 ns / 368 ns** |
* The logic used by the imperix IP depends on the enabled features, as explained in the Disabling Features to Save FPGA Resources section.
** When channels A12-A23 are used.
Imperix firmware IP interfaces description
ADC interface
The ADC interface returns the raw 16-bit signed integer result from the ADC chips.
PN126 further describe how to retrieving ADC measurements from the FPGA sandbox.

| Port Name | Direction | Width | Clk domain | Description |
|---|---|---|---|---|
ADC_reg_XX | Output | 16bits | clk_250_mhz | ADC 16-bit result in 2’s complement format. XX = channel |
adc_done_pulse | Output | 1 bit | clk_250_mhz | Indicates that new ADC samples are available. |
adc_done_cpu_pulse | Output | 1 bit | clk_250_mhz | Decimated version of adc_done_pulse when a postscaler is used. Set when the CPU control path stages are scheduled to run. |
ADC_FLOAT interface
Available exclusively on the B-Box 4 platform, this interface provides the real physical values in single-precision floating-point format. The rescaling from the raw 16-bit ADC value is configured by setting the sensor sensitivity and offset from the ADC block. Results from this interface are delayed by 192 ns compared to the 16-bit ADC interface.

| Port Name | Direction | Width | Clk domain | Description |
|---|---|---|---|---|
ADC_FLOAT_reg_XX | Output | 32bits | clk_250_mhz | ADC floating-point result post rescaling. XX = channel |
adc_done_float_pulse | Output | 1 bit | clk_250_mhz | Indicates that new ADC_FLOAT samples are available. |
adc_done_cpu_float_pulse | Output | 1 bit | clk_250_mhz | Decimated version of |
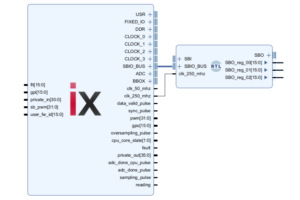
SBIO interface
The SBIO_BUS (SandBox IO Bus) is a 16-bit memory-mapped bus allowing the CPU to address up to 1024 registers in the FPGA.
Direct interaction with the bus signals is usually not required since the imperix FPGA Sandbox template includes a suite of helper modules that abstract the bus complexity.
PN128 further describe how to exchange data between the CPU and the FPGA.
| Port Name | Direction | Width | Clk domain | Description |
|---|---|---|---|---|
SBIO_BUS_sb_addr | Output | 10 bits | clk_250_mhz | Address of the accessed register |
SBIO_BUS_sb_we | Output | 1 bit | clk_250_mhz | Write enable |
SBIO_BUS_sb_wdata | Output | 16 bits | clk_250_mhz | Write data |
SBIO_BUS_sb_rdata | Input | 16 bits | clk_250_mhz | Read data |
The bus performs read operations by setting the requested address on sb_addr and expects the corresponding data on sb_rdata exactly four cycles later.

A write occurs on each rising edge of clk when sb_we is asserted. The target location is given by sb_addr and the value written is sb_wdata.

The two additional signals listed below are provided to help synchronize custom logic with the SBIO bus operations:
| Signal | Direction | Width | Clk domain | Description |
|---|---|---|---|---|
reading | Output | 1 bit | clk_250_mhz | Asserted high while data (ADC, SBI, GPI) are being read by the CPU. |
data_valid_pulse | Output | 1 bit | clk_250_mhz | Single-cycle pulse indicating that all SBO registers have been written for the current CPU control task. |
SB-PWM interface
The SB-PWM (SandBox-PWM) interface allows driving PWM outputs directly from custom FPGA logic.
The sandbox PWM inputs (sb_pwm port from the imperix IP) are considered as an additional PWM source, equivalently to the output of all built-in modulators. This means that the dead-time generation, activation and protection mechanisms are also available when driving the PWM from the sandbox and are configured from the SB-PWM block.
PN127 further describe how to drive PWM outputs from the FPGA.
| Port Name | Direction | Width | Clk domain | Description |
|---|---|---|---|---|
sb_pwm | Input | 48 bits (Gen 4) 32 bits (Gen 3) | clk_250_mhz | PWM signals driven from sandbox logic. |
CLOCK interfaces
The CLOCK interface provides access to the 4 clock generator time bases. The main clock CLOCK_0 is configured via the CONFIG block, CLOCK_1, CLOCK_2 and CLOCK_3 are configured via CLK blocks.
| Port Name | Direction | Width | Clk domain | Description |
|---|---|---|---|---|
CLOCK_N_period | Output | 16 bits | clk_250_mhz | Period of the clock in ticks. |
CLOCK_N_prescaler | Output | 16 bits | clk_250_mhz | Indicates the CLOCK_N_timer ticking rate.1 tick = 4 ns * |
CLOCK_N_timer | Output | 16 bits | clk_250_mhz | Timer counting from 0 to CLOCK_period-1 at the ticking rate set by the CLOCK_N_prescaler. |
CLOCK_N_clk_en | Output | 1 bit | clk_250_mhz | Clock enable pulse indicating when CLOCK_N_timer is updated. |
The prescaler extends the achievable frequency range beyond what the 16-bit period timer counter alone can provide. With CLOCK_N_prescaler = 1, the minimum achievable frequency is approximately 3.8 kHz (250 MHz / 65535). For lower frequencies, the CLOCK_N_prescaler automatically increases and the firmware tries to closely match the requested frequencies.
Example:
- A frequency of 20 kHz results in
CLOCK_prescaler = 1andCLOCK_period = 12500 ticks. - A frequency of 2 kHz results in
CLOCK_prescaler = 2andCLOCK_period = 62500 ticks.
When prescaler = 1:
clk_enis asserted everyclk_250_mhzcycleCLOCK_0_timerincrements on every clock edge

When prescaler > 1:
clk_enis asserted once every X cycles (where X = prescaler value)CLOCK_0_timerincrements only whenclk_enis high

GT interfaces
The Gigabit Transceiver (GT) interface provides access to high-speed serial transceivers connected to the SFP socked of the controller. This enables custom point-to-point communication with external devices such as other controllers, custom hardware etc.
The Aurora communication examples details how to use the Aurora 8B/10B or Aurora 64B/66B protocol on imperix controllers.
Examples of SFP communication with third-party hardware-in-the-loop (HIL) simulators (OPAL-RT, Plexim and RTDS) are provided in SFP communication with third-party devices.
| Feature | Gen 4 | Gen 3 |
|---|---|---|
| Available transceivers | 4x GTH (1x QSFP connector, lanes 4–7) | 3x GTX (3x SFP connectors) |
| Maximum line rate | 16.3 Gbps | 6.6 Gbps |
Accessing GTH transceivers on Gen 4 controller
On Gen 4, the QSFP lanes 4–7 are currently unassigned and can be used freely from the sandbox without affecting other functionalities. Lanes can be exposed to the sandbox from the Configuration tab in the imperix firmware IP configuration. Each enabled lane exposes the following signals:
| Port Name | Direction | Description |
|---|---|---|
GT_USER_TX_N_txp | Output | Transmit positive (differential) |
GT_USER_TX_N_txn | Output | Transmit negative (differential) |
GT_USER_RX_N_rxp | Input | Receive positive (differential) |
GT_USER_RX_N_rxn | Input | Receive negative (differential) |
gt_refclk | Output | 250 MHz reference clock (shared across all lanes) |
Accessing GTX transceivers on Gen 3 controller
On Gen 3, the SFP ports are used by default for RealSync inter-device communication. Using a port from the sandbox requires disabling RealSync on that specific link, which removes the inter-device communication capability on that port. Lanes can be exposed to the sandbox from the Configuration tab in the imperix firmware IP configuration. Each enabled lane exposes the following signals:
| Port Name | Direction | Description |
|---|---|---|
txp_N | Output | Transmit positive (differential) |
txn_N | Output | Transmit negative (differential) |
rxp_N | Input | Receive positive (differential) |
rxn_N | Input | Receive negative (differential) |
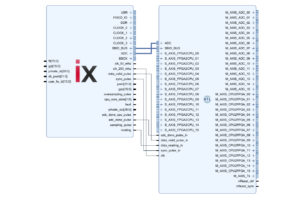
Serial port interfaces
The serial port interfaces are exclusive to the B-Box 4 and are typically used by the pre-implemented SSI, BiSS-C and EnDat2.2 FPGA drivers. The imperix IP allows bypassing these built-in drivers by providing direct access to RS485/RS422 transceiver signals from the sandbox, as illustrated below.
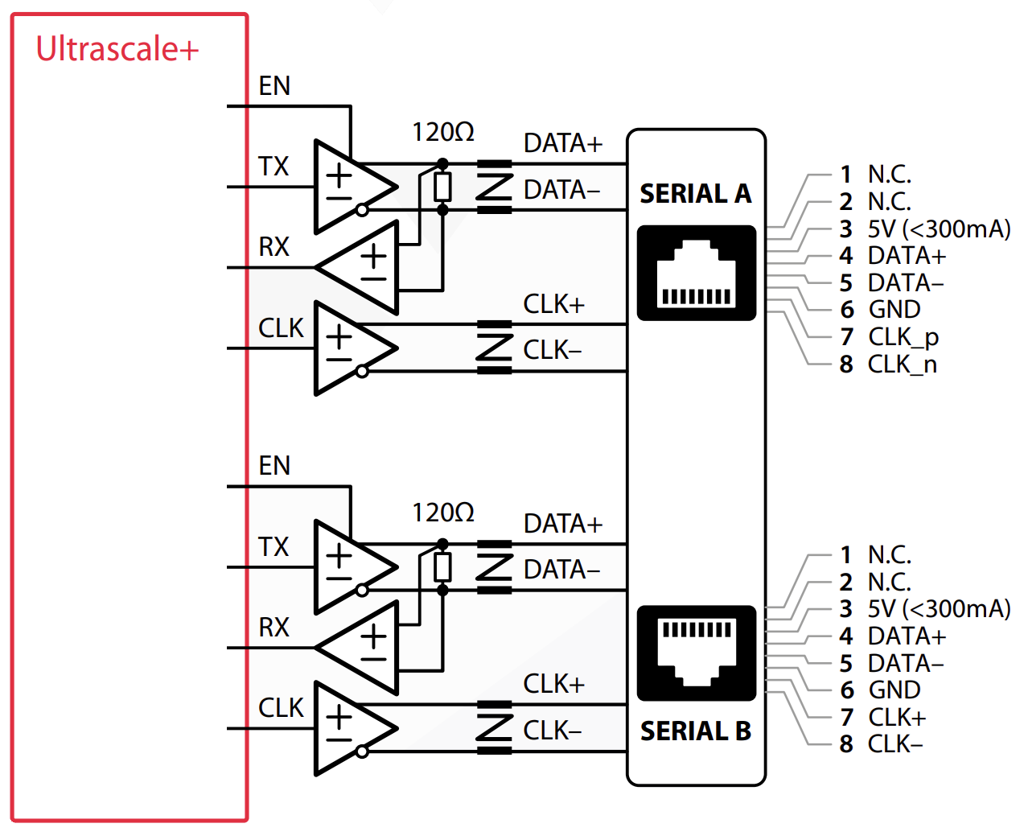
The serial ports (A and/or B) can be made available from the sandbox from the Configuration tab in the imperix firmware IP configuration. Each enabled serial port exposes the following signals:
| Port Name | Direction | Description |
|---|---|---|
SERIAL_X_rx | Input | Receive data from external device |
SERIAL_X_tx | Output | Transmit data to external device |
SERIAL_X_clk | Output | Clock signal for synchronous protocols |
SERIAL_X_en | Output | Transceiver enable (active high) |
BSCAN Interface to observe internal signals using ILA
The BSCAN (Boundary Scan) interface exposes the FPGA’s debug scan chain to the sandbox and enables the use of Integrated Logic Analyzers (ILAs) and other Xilinx debug cores. Combined with the Xilinx Virtual Cable (XVC) protocol, this allows remote debugging of internal FPGA signals directly from Vivado’s Hardware Manager over Ethernet.
For detailed instructions on adding ILAs to your design and connecting to them via XVC, refer to How to debug an FPGA design.
Digital I/Os drivers
The sandbox exposes various digital I/O signals. Some ports are available for user logic, while others are reserved for internal system operation and must not be modified.
For detailed pin locations and electrical specifications, refer to the relevant datasheet:
- B-Box 4 datasheet
- B-Box RCP datasheet
- B-Box Micro datasheet
- B-Board PRO datasheet
- TPI 8032 datasheet
The USR pins
The USR pins are 36 user-configurable 3.3V I/Os that are routed directly to the FPGA, without any resistor or level shifter on the PCB trace. They used for interfacing external peripherals (e.g., SPI ADC).
To learn more refer to the Accessing the USR pins in the FPGA sandbox page.
| Port Name | Direction | Description |
|---|---|---|
USR[35:0] | Tristate | These pins are used by the motor interface and the programmable inverter. When none of these devices are used, the USR pins can freely be accessed from the sandbox. |
Private Ports
These ports are required for internal communication with controller components. Modifying these connections may cause undefined behaviour.
| Port Name | Direction | Description |
|---|---|---|
private_in | Input | Internal system signals. Width varies by generation. |
private_out | Output | Internal system signals. Width varies by generation. |
DDR | – | DDR memory interface |
FIXED_IO | – | Fixed I/O interface to PS |
Gen 4 ports
| Port Name | Direction | Description |
|---|---|---|
din[23:0] | Input | General-purpose or fault feedback inputs (GPI/FLT) |
dout[47:0] | Output | General-purpose outputs or PWM outputs (GPO/PWM) |
dout connection, as this would bypass the protection mechanism! Instead, PWM signals from the sandbox should be routed through the sb_pwm input port.Gen 3 ports
| Port Name | Direction | Clock Domain | Description |
|---|---|---|---|
flt[15:0] | Input | clk_250_mhz | Fault inputs |
gpi[15:0] | Input | clk_250_mhz | General-purpose inputs |
gpo[15:0] | Output | clk_250_mhz | General-purpose outputs |
pwm[31:0] | Output | clk_250_mhz | PWM output signals |
BBOX[51:0] | Tristate | N/A | Internal B-Box RCP pins. Can be repurposed on B-Board PRO with custom PCB design (see PN201). |
pwm connection, as this would bypass the protection mechanism! Instead, PWM signals from the sandbox should be routed through the sb_pwm input port.Disabling features to save FPGA resources
The imperix firmware IP includes several optional features that can be disabled to free up FPGA resources for custom sandbox logic. Access the resource-saving options from the Saving FPGA resources tab in the imperix firmware IP configuration.
Disabling a feature removes it entirely from the FPGA design. If the corresponding functionality is used in the CPU model, an error will be raised in Cockpit.
Unused PWM modulators can be removed to save logic resources. The CB-PWM logic can be disabled in groups of 8 lanes.
| Feature | Gen 4 | Gen 3 |
|---|---|---|
| CB-PWM lanes 0–7 | ✓ | ✓ |
| CB-PWM lanes 8–15 | ✓ | ✓ |
| CB-PWM lanes 16–23 | ✓ | ✓ |
| CB-PWM lanes 24–31 | ✓ | ✓ |
| CB-PWM lanes 32–39 | ✓ | — |
| CB-PWM lanes 40–47 | ✓ | — |
| SS-PWM logic | ✓ | ✓ |
| PP-PWM logic | ✓ | ✓ |
Resource Savings
| Feature | Gen 4 | Gen 3 |
|---|---|---|
| CB-PWM (per 8 lanes) | ~2100 LUTs (0.9%) ~2800 Registers (0.6%) | ~1600 LUTs (2.03%) ~2000 Registers (1.27%) |
| SS-PWM | ~6250 LUTs (2.71%) ~5500 Registers (11.93%) | ~2700 LUTs (3.43%) ~3300 Registers (2.1%) |
| PP-PWM | ~4400 LUTs (1.9%) ~9200 Registers (2%) | ~4400 LUTs (5.6%) ~9150 Registers (5.82%) |
Related Articles

Download of the imperix firmware IP for FPGA sandbox
By Benoît Steinmann • September 5, 2024 • PN117
Driving PWM outputs from the FPGA
By François Ledent • April 16, 2026 • PN127
Exchanging data between the CPU and the FPGA
By François Ledent • April 16, 2026 • PN128
Getting started with FPGA programming
By Benoît Steinmann • June 2, 2021 • PN159
Retrieving ADC measurements from the FPGA
By Benoît Steinmann • April 16, 2026 • PN126
Upgrading the imperix firmware IP
By François Ledent • April 16, 2026 • PN174